Now I'm debugging the tsc2046ipwr on i.MX7D platform using Linux 3.14 kernel, the driver I used is ads7846.c.
after probe, X+ and PENIRQ keep high, In normal condition, if I touch the screen, X+ and PENIRQ will change to low, when my finger leave the screen, the X+ and PENIRQ will return to High level.
But accutually, I meet this issue:
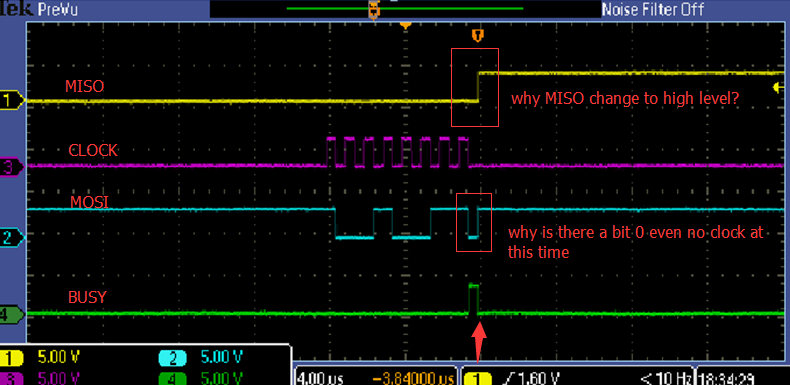
Once I touch the screen, the pin PENIRQ changes to low level, and keep low even my finger leave the screen, and driver will continue send SPI comand and report input message. X+ return to high level, but X+ will never change to low level even if I touch the screen( just a little reduce at this time).
In this driver, I see that, every cycle, the last comand is PWRDOWN, this should make tsc2046 go into power-down mode. And according to the SPEC, in power-down mode, PENIRQ will go with X+, Why PENIRQ keeps low even X+ is high?
Can anyone help explain this issue?
Best regards
Haibo Chen
.