Hello All,
I have purchased AFE4404 IC as well as AFE4404 EVM,
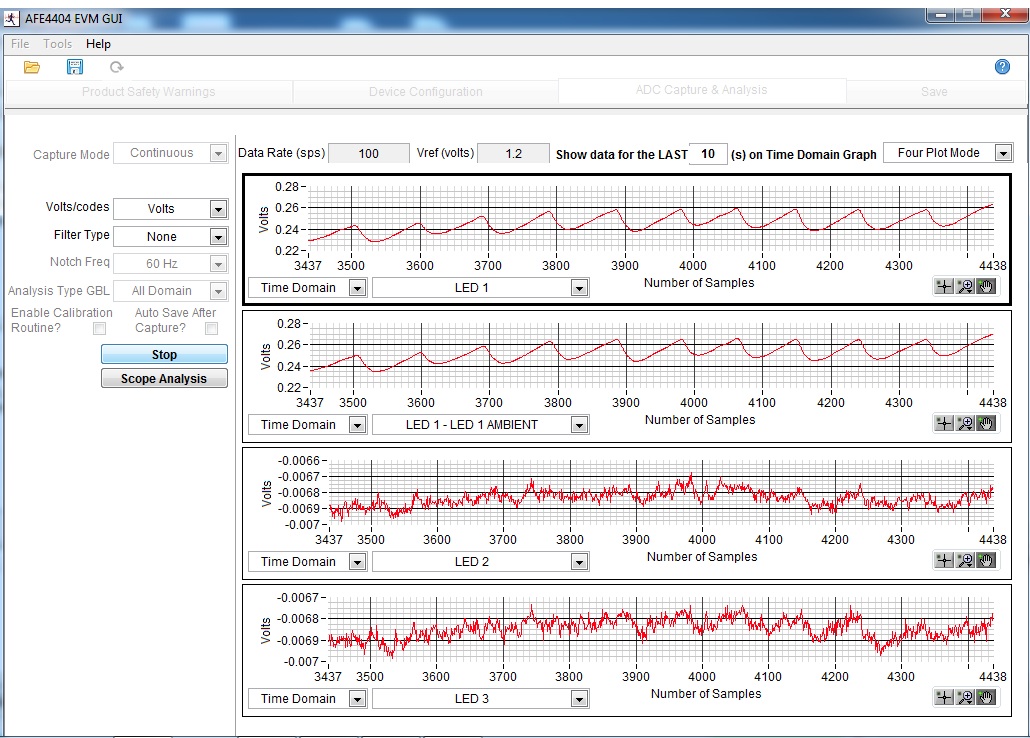
I have configured EVM GUI and got sawtooth wave forms so taken those registers settings and went ahed after applying so many other ways I am not able to get heart rate.
There is not a single response from TI support side, even I found no document mentioning about the heart rate , I have posted even some of the queries related to that but got deleted and in initial conversation I got some of the links
- e2e.ti.com/.../369445 (see #18 question)
- e2e.ti.com/.../462275
I tried to follow them even but still I am unable to get heart rate so I request you to help me to get heart rate.
Or is there any one who has/had worked upon this IC to calculate heart rate ?
Did I chose the wrong IC to calculate Heart rate ?
Any help on this would be greatly appreciated.
Thanks & Regards,
Rutvij.