Hello,
I want to interface ADS1243 with MSP432P401R processor.ADS1243 is run @4.9152MHz external crystal.ADC work on 3.3V supply. Vref+ is +2.5V and Vref- is 0V(GND). If input voltage given to ADC is 1V then what should be the output data code??( output data code=Vin/(Vref/2^n-1)=666666H is right or wrong??)
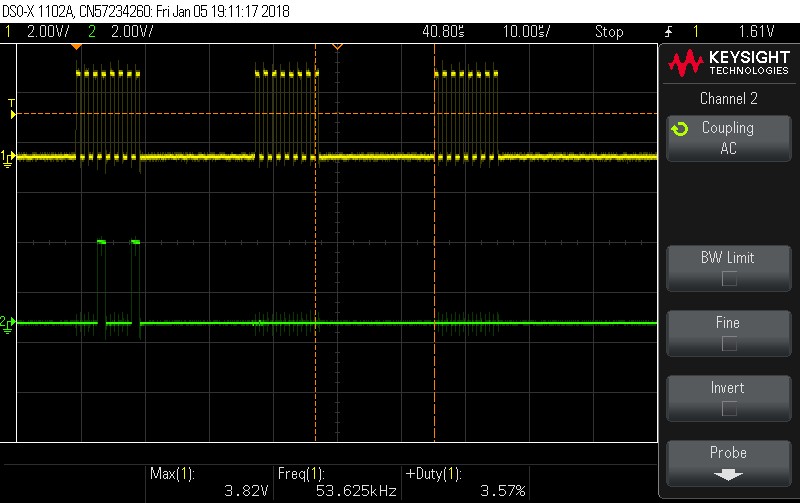
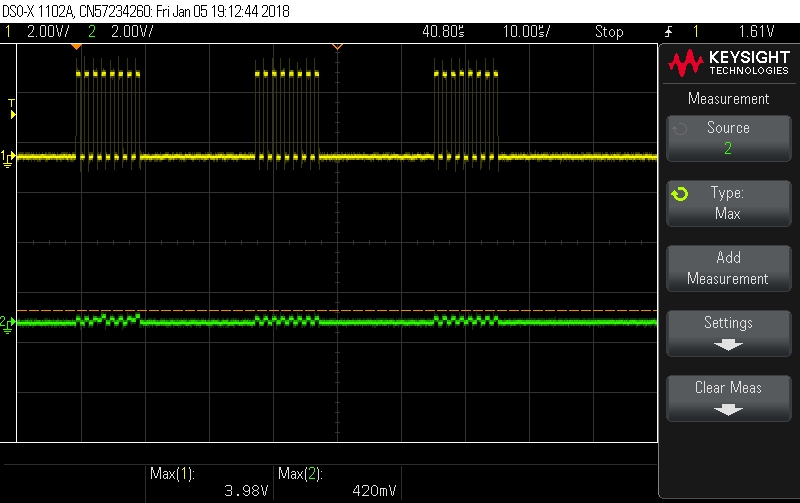
I am using default condition in register setup except speed bit and range bit is set to 1.SPI is working on 750kHz frequency.
Please check my code attached below and code sequence.
// MSP432P401M controller
/*
* main.c
* Created on: April 04, 2017
*/
#include "msp432p401m.h"
#include "ads1243.h"
void main(void)
{
WDT_A->CTL = WDT_A_CTL_PW + WDT_A_CTL_HOLD; // Stop WDT
pin_init();
dev_init_48M();
dev_init_32k();
InitDevice();
InitSPI();
InitDevice();
InitSPI();
ADS1243WaitForDataReady();
ADS1243AssertCS();
ADS1243SendByte();
ADS1243ReceiveByte();
ADS1243ReadData();
ADS1243ReadRegister();
ADS1243WriteRegister();
ADS1243WriteSequence();
ADS1243Speed();
ADS1243Range();
ADS1243SendSync();
}
void InitSPI(void)
{
#if defined (__MSP432P401M__)
EUSCI_B3->CTLW0 |= EUSCI_B_CTLW0_SWRST; // Put state machine in reset
EUSCI_B3->CTLW0 = EUSCI_B_CTLW0_SWRST |
EUSCI_B_CTLW0_SYNC | // Synchronous mode
EUSCI_B_CTLW0_CKPL | // Clock polarity high
EUSCI_B_CTLW0_MSB | // MSB first
EUSCI_B_CTLW0_MODE_1 | // 4-pin SPI mode
EUSCI_B_CTLW0_MST| // master mode select
EUSCI_B_CTLW0_STEM | // STE mode select
EUSCI_B_CTLW0_SSEL__SMCLK; // SMCLK
EUSCI_B3->BRW = 0x01; // /2,fBitClock = fBRCLK/(UCBRx+1).
EUSCI_B3->CTLW0 &= ~EUSCI_B_CTLW0_SWRST;// **Initialize USCI state machine**
while(!(UCB3IFG&UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB3TXBUF =0x55; // 4-pin, 8-bit SPI slave
#endif
}
void InitDevice(void)
{
#if defined (__MSP432P401M__)
P10->SEL0 |= ADS1243_DIN + ADS1243_DOUT + ADS1243_SCLK;
P2->SEL0 &= ~(ADS1243_DRDY);
// define initial state
P10OUT |= ADS1243_CS;
// define inputs
P2DIR &= ~(ADS1243_DRDY); // DRDY is an input to the micro
// define outputs
P10DIR |= ADS1243_CS;
#endif
}
/*
* DRDY Polling Function
* Timeout = 0 is wait until DRDY goes low no matter how long it takes, otherwise wait the specified number of cycles
*/
int ADS1243WaitForDataReady(int Timeout)
{
/* This function shows a method for polling DRDY instead of using as interrupt function
* -- Note: this method is not used in the demo, but if we the method was switched to polling from the interrupt method,
* the desired port is PORT2 on the MSP430 as this demo is configured.
*/
#if defined (__MSP432P401M__)
if (Timeout > 0)
{
// wait for /DRDY = 1 to make sure it is high before we look for the transition low
while (!(P2IN & ADS1243_DRDY) && (Timeout-- >= 0));
// wait for /DRDY = 0
while ( (P2IN & ADS1243_DRDY) && (Timeout-- >= 0));
if (Timeout < 0)
return ADS1243_ERROR; //ADS1243_TIMEOUT_WARNING;
}
else
{
// wait for /DRDY = 1
while (!(P2IN & ADS1243_DRDY));
// wait for /DRDY = 0
while ( (P2IN & ADS1243_DRDY));
}
#endif
return ADS1243_NO_ERROR;
}
/*
* Primary Low Level Functions
*/
void ADS1243AssertCS( int fAssert)
{
#if defined (__MSP432P401M__)
// This example is using PORT10 for GPIO CS control, ADS1243_CS is defined in ADS1243.h
if (fAssert){ // fAssert=0 is CS low, fAssert=1 is CS high
_delay_cycles(50); // Must delay minimum of 7 tosc periods from last falling SCLK to rising CS
P10OUT |= (ADS1243_CS);
} else
P10OUT &= ~(ADS1243_CS);
#endif
}
void ADS1243SendByte(unsigned char Byte)
{
char dummy;
#if defined (__MSP432P401M__)
dummy = UCB3RXBUF;
while(!(UCB3IFG&UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB3TXBUF =0x55; // Send the passed Byte out the SPI bus
while(!(UCB3IFG&UCRXIFG)); // Before returning wait until transmission is complete and clear the RX buffer
dummy = UCB3RXBUF;
#endif
}
unsigned char ADS1243ReceiveByte(void)
{
unsigned char Result = 0;
#if defined (__MSP432P401M__)
// while(!(UCB3IFG&UCTXIFG)); // Make sure nothing is currently transmitting
// UCB3TXBUF = ADS1243_CMD_NOP; // Send out NOP to initiate SCLK
while(!(UCB3IFG&UCRXIFG)); // Wait until all data is transmitted (received)
Result = UCB3RXBUF; // Capture the receive buffer and return the Result
#endif
return Result;
}
long ADS1243ReadData(void)
{
long Data;
// assert CS to start transfer
ADS1243AssertCS(0);
// send the command byte
ADS1243SendByte(ADS1243_CMD_RDATA);
// get the conversion result
#ifdef ADS1243
Data = ADS1243ReceiveByte();
Data = (Data << 8) | ADS1243ReceiveByte();
// sign extend data if the MSB is high (16 to 32 bit sign extension)
if (Data & 0x8000)
Data |= 0xffff0000;
#else
Data = ADS1243ReceiveByte();
Data = (Data << 8) | ADS1243ReceiveByte();
Data = (Data << 8) | ADS1243ReceiveByte();
// sign extend data if the MSB is high (24 to 32 bit sign extension)
if (Data & 0x800000)
Data |= 0xff000000;
#endif
// de-assert CS
ADS1243AssertCS(1);
return Data;
}
void ADS1243ReadRegister(int StartAddress, int NumRegs, unsigned * pData)
{
int i;
// assert CS to start transfer
ADS1243AssertCS(0);
// send the command byte
ADS1243SendByte(ADS1243_CMD_RREG | (StartAddress & 0x0f));
ADS1243SendByte((NumRegs-1) & 0x0f);
// get the register content
for (i=0; i< NumRegs; i++)
{
*pData++ = ADS1243ReceiveByte();
}
// de-assert CS
ADS1243AssertCS(1);
return;
}
void ADS1243WriteRegister(int StartAddress, int NumRegs, unsigned * pData)
{
int i;
// set the CS low
ADS1243AssertCS(0);
// send the command byte
ADS1243SendByte(ADS1243_CMD_WREG | (StartAddress & 0x0f));
ADS1243SendByte((NumRegs-1) & 0x0f);
// send the data bytes
for (i=0; i < NumRegs; i++)
{
ADS1243SendByte(*pData++);
}
// set the CS back high
ADS1243AssertCS(1);
}
void ADS1243WriteSequence(int StartAddress, int NumRegs, unsigned * pData)
{
int i;
char dummy;
// set the CS low
ADS1243AssertCS(0);
#if defined (__MSP430F5529__)
// send the command byte
dummy = UCB3RXBUF;
while(!(UCB3IFG&UCTXIFG)); // Make sure nothing is already in the TX buffer
UCB3TXBUF = ADS1243_CMD_WREG | (StartAddress & 0x0f);
while(!(UCB3IFG&UCRXIFG));
dummy = UCB3RXBUF;
UCB3TXBUF = (NumRegs-1) & 0x0f;
while(!(UCB3IFG&UCRXIFG));
dummy = UCB3RXBUF;
// send the data bytes
for (i=0; i < NumRegs; i++)
{
UCB3TXBUF = *pData++;
while(!(UCB3IFG&UCRXIFG));
dummy = UCB3RXBUF;
}
#endif
// set the CS back high
ADS1243AssertCS(1);
}
int ADS1243Speed(void)
{
// write the register value containing the new value back to the ADS
ADS1243WriteRegister(ADS1243_2_ACR , 0x01,ADS1243_SPEED_1);
}
int ADS1243Range(void)
{
// write the register value containing the new value back to the ADS
ADS1243WriteRegister(ADS1243_2_ACR , 0x01, ADS1243_SCALE_1);
}
void ADS1243SendSync(void)
{
// assert CS to start transfer
ADS1243AssertCS(0);
// send the command byte
ADS1243SendByte(ADS1243_CMD_DSYNC);
// de-assert CS
ADS1243AssertCS(1);
return;
}