hello ,
im using the ADS126xEVM REV A
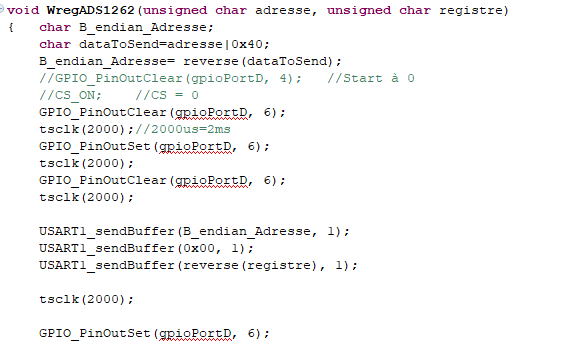
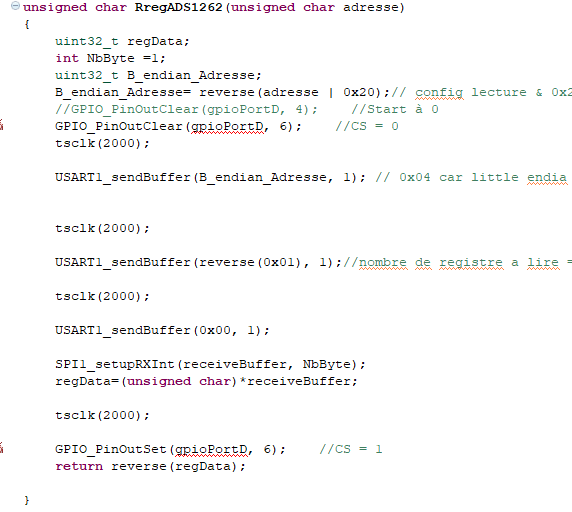
and im having some issues when i write in some registers , some of them wont change, it gives 0 when i read them but other registers are working fine with write commande .
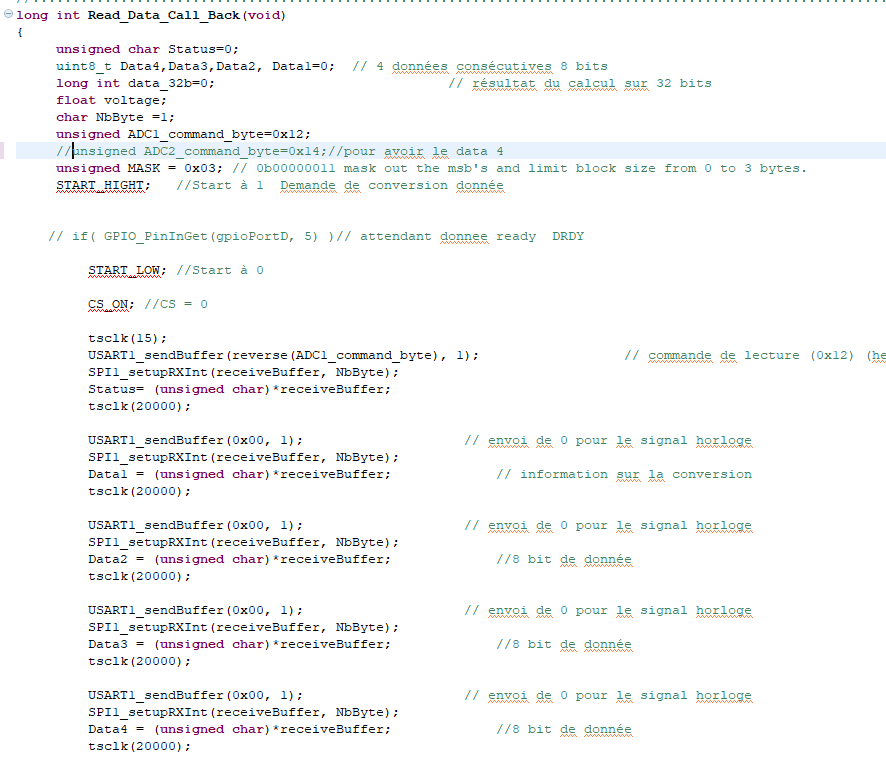
plus im having a probleme with DRDY its not working , even though there is some signals on the input to converte .
i just need your help or some explanation or advices that i can maybe try it .
Thank you
best regard
julien