Hi Team,
Our customer is trying to connect the DLPNIRNANOEVM to Arduino MKR WIFI 1010 through the UART port. According to our customer,
I connected an external power to DLP NIR Nano, and connects four pins (1,2,3,and 4) to my Arduino board. I use the sample codes from DLP NIR Nano GUI app.cpp to generate UART commands. I use the Arduino Serial.write() and Serial.read() to send and receive commands. However, the Arduino board cannot receive any byte from DLP NIR Nano. It seems the connection is not built.
Should I connect all the 10 pins? And if the voltage is greater than 3.3V, will that affect the connection?
I understand that only pins 2-4 are required to use the UART port. He said in another email,
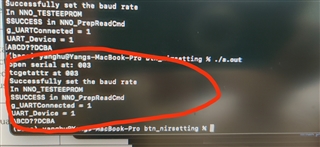
I connected the DLPNIRNANOEVM to my Windows OS, it works well, and there is no error status shown.
BTW, I tested the voltage of the expansion connector, pin 1 and 4 shows a voltage of 3.3V, but pin 3 has 0 voltage. Is this normal?
I connected pin 3 and 4 to my Arduino board tx and rx port, the corresponding rx has 3.35 voltage, but tx has 0 voltage. Will this be the case why I cannot receive any byte from serial?
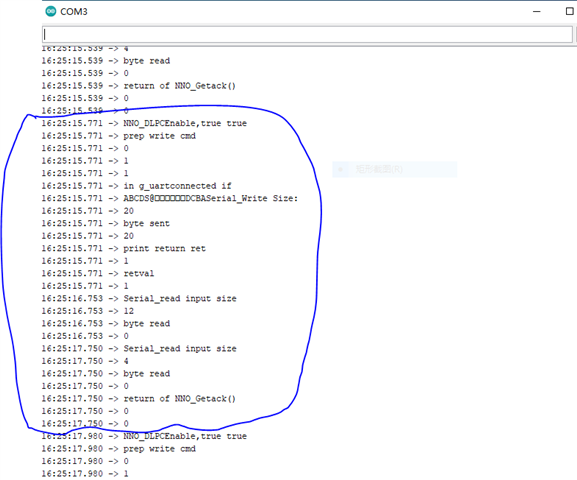
I made mistakes when describing the serial sending, I sent an NNO_CMD, with 20 bytes, but the Serial write returns 0 bytes were sent. And when I try to read from the Serial, there are data there.
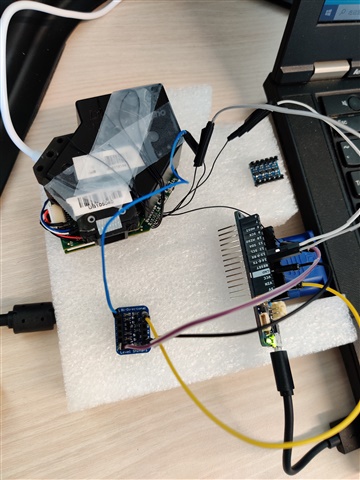
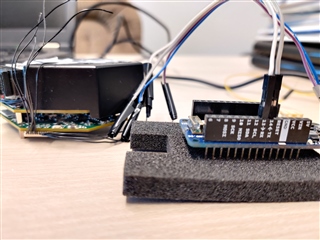
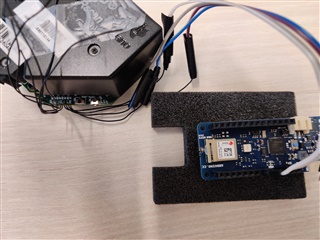
I enclosed pictures of how I connect my DLPNIRNANOEVM to my Arduino board. Both devices connect to external power. So they only connect via UART ports. I also enclosed my Arduino codes, I called the NNO_CMD_DLPC_ENABLE command.
Regards,
Danilo