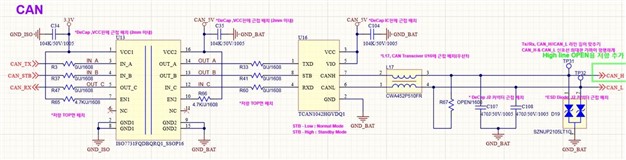
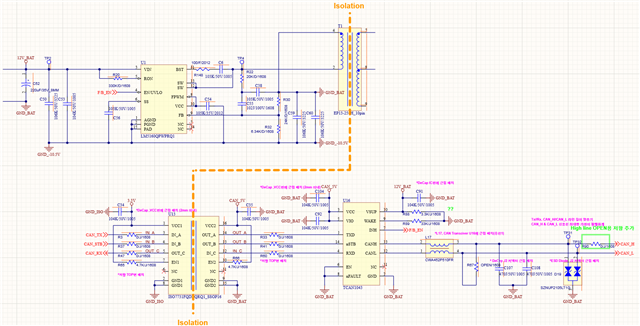
Part Number: TCAN1042HGV-Q1
Other Parts Discussed in Thread: LM5160, TCAN1043, ISO7742
Hi Team,
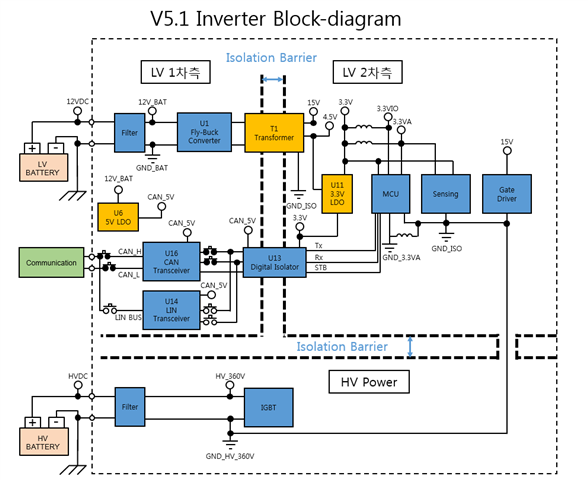
The customer is using the TCAN1042HGV-Q1 for the electric compressor inverter.
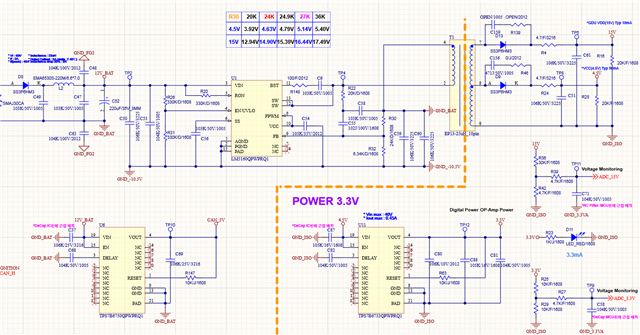
Even if the secondary circuit enters Sleep mode and does not consume electricity, 20 mA is consumed continuously switching the Transformers in the Fly-buck circuit on the primary side.
The customer wants to enable/disable the LM5160 IC using CAN Transceiver with wake-up function.
Q1: Is there any way to enable/disable LM5160 IC using CAN Transceiver with wake-up function?
Q2. Please recommend a product that can enable/disable LM5160.