Hello,
Below is the block diagram of my system.
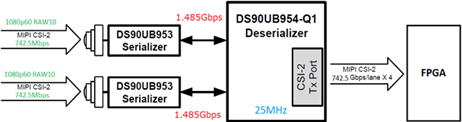
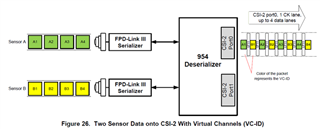
I want to combine like both video stream and output to CSI-2 Port 0 in 4 data lanes and 1 clock lane. (assigning different virtual ID to both sensor)
I used below Initialize sequence. but FPGA's MIPI CSI decoder is unable to detect proper MIPI signals.
// 0x60 DS954 Address
// 0x30 DS953 Address
// 0x6C Sensor Address
{0x60, 0x0C, 0x3F}, // Enable both RX0 & RX1
{0x60, 0x1F, 0x02}, // 800 Mbps
{0x60, 0x4C, 0x01}, // RX0
{0x60, 0x72, 0xE8}, // Sensor A VC0 to CSI-TX VC0 (CSI-2 input mode)
{0x60, 0x4C, 0x12}, // RX1
{0x60, 0x72, 0xED}, // Sensor B VC0 to CSI-TX VC1 (CSI-2 input mode)
{0x60, 0x33, 0x03}, // CSI EN & Cont Clock Enable
{0x60, 0x21, 0x01}, // Round Robin forwarding
{0x60, 0x20, 0x00}, // forwarding all RX to CSI0
{0x60, 0x4C, 0x0F}, // RX0 sensor Read and Broadcast Write
{0x60, 0x58, 0x5E},
{0x60, 0x5C, 0x30},
{0x60, 0x5D, 0x6C},
{0x60, 0x65, 0x6C},
{0x30, 0x0B, 0x13},
{0x30, 0x0C, 0x26},
{0x30, 0x02, 0x53},
{0x30, 0x0E, 0x30},
{0x30, 0x0D, 0x03},
{0x30, 0x0D, 0x01},
{0x30, 0x0D, 0x03},
I am using both same sensor and resolution and frame rate are also same. So which forwarding method is best Round Robin or Basic Sync Forwarding?
is my initialization code is ok? Virtual ID assignment is OK?
What will be the data rate per lane of CSI-0 TX? (800Mbps)