Part Number: TCAN4550
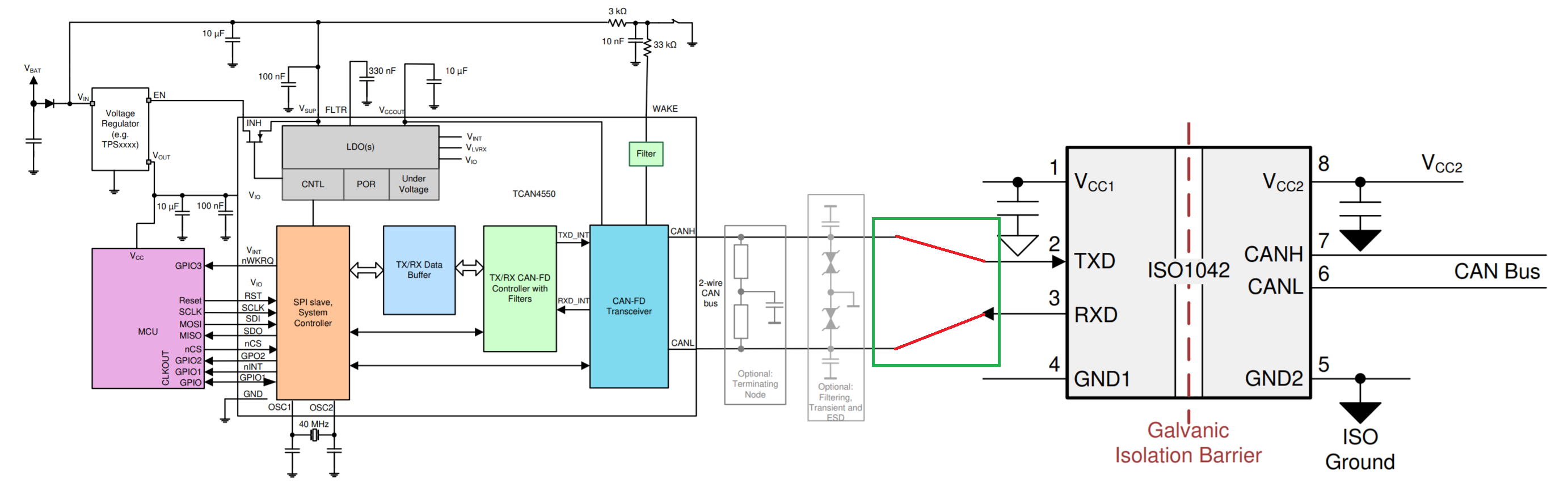
Other Parts Discussed in Thread: , TCAN1043, ISO1042
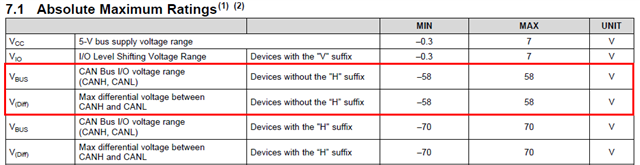
In order to meet the specification of the devices shall handle +/- 30V common mode noise. May I know what items in datasheet we need to reference? Is it V_CM or V_BUS?
BR, Gary