Hi team,
- How the MCU recognizes whether the TCAN1043A - Q1 operates in typical high speed can modes (e.g., 500Kbps) or can FD modes (e.g., 8Mbps)
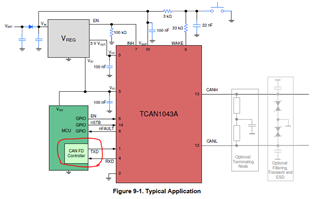
- In the typical application circuit diagram in the specification document, The CAN controller of the MCU is “CAN FD Controller”, as shown in the red circle below, if the MCU does not have a can FD Controller, only a classical CAN Controller, can the classical CAN Controller of the MCU communicate with the TCAN1043A-Q1 normally, or must the CAN controller of the MCU be a CAN FD Controller for proper communication with TCAN1043A-Q1?