Part Number: TCAN1044AV-Q1
Hi Sir,
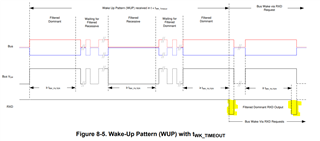
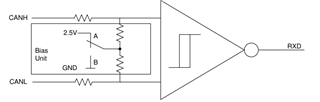
My customer meet a problem with the standby mode, why the RXD is providing the incorrect waveform after engine-ON?
Why are there not see any wake-up waveform? cause the system can not going to the normal mode.
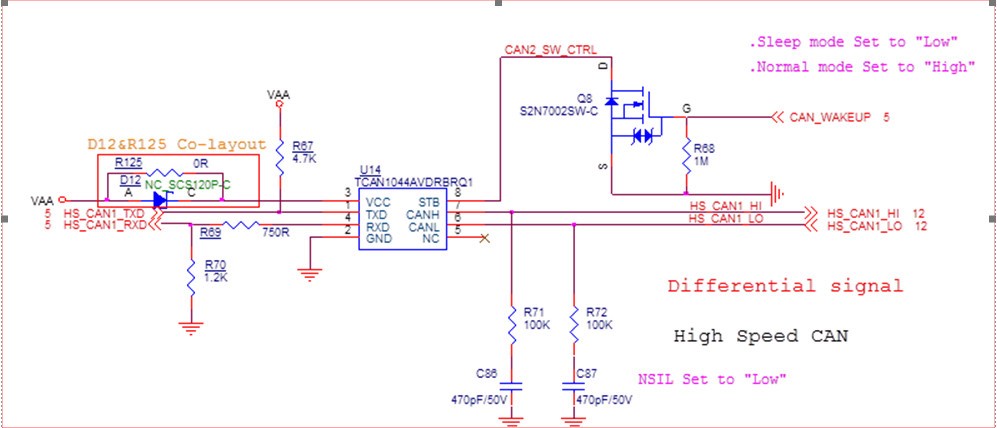
Could you please check the below schematics is correct or not?
(VCC=5V, VIO=5V, VAA=3.3V; VCC & VIO & VAA are exist and the STB used the internal pull-up on the standby mode)
engine OFF_STB and RXD: (into standby mode)

engine ON_STB and RXD: (keep on standby mode)

engine ON_CAN_H and RXD: (keep on standby mode)