
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Hello Everyone!
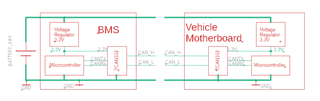
I am from Delhi, India and we work on low-power e-scooters. We are using TCAN332 CAN transceivers on all the nodes in our e-scooters. We have a BMS (High side switching, in-house design using BQ76940) and a Vehicle motherboard. The scooter facilitates a ‘swappable battery' architecture. The entire system has been running fine for a few months now. Please refer to Fig. 1 below for a broad outline of the system (for simplicity, I have omitted unnecessary details on the BMS and Motherboard):
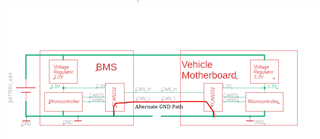
Recently I have noticed that if somehow, the GND pin is left unconnected (Faulty wire or misaligned battery connector) or other pins connect first and the GND pin connects in the end, then the CAN transceivers on both boards fry/blow up, everything else remains undamaged. I suspect that The CAN H and CAN L pins provide an ‘alternate return path’ to the GND, as shown in fig. 2 below:
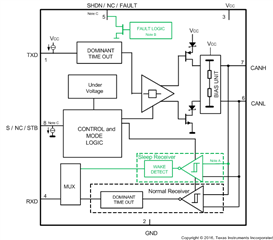
This hypothesis comes from the internal block diagram of the TCAN332 IC as given in the datasheet (Fig.3 below):
Please let me know if I understand this correctly. Also, please help me with any possible solutions to this problem. I want the system to be fail-safe in such cases.
Thanks in Advance.



