Hello TI team,
I have following questions on TCAN1044A-Q1, terminal resistor and CM choke:
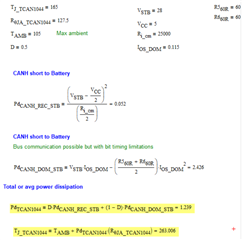
1. The power dissipation of TCAN1044A-Q1 transceiver is calculated as:
Pd = [(1-D) * Icc_rec * Vcc + D * Icc_dom * (Vcc-Vo_dom) + Vcc*Iq]
considering D = 0.5 for 50% in dominant and 50* in recessive mode.
Please confirm whether above is correct way to calculate it.
2. What is the max supply avg current I should consider for TCAN1044?
If I consider D = 0.5, can i calculate the avg supply current as follows:
I.avg = [D * (Icc_dom + Icc_rec) + Iq] , pls confirm
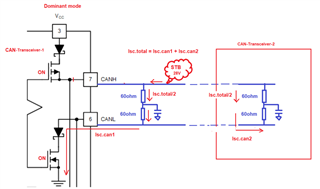
3. For termination resistance power dissipation; when CANH = Vbat ; CANL = GND
Can I calculate power dissipation of Rterm as follows:
Pd(RT) = (I.sc_CAN/2)^2 * RT * D
OR D * (I.sc_dom/2)^2 * RT + (1-D) * (I.sc_rec/2)^2 * RT
4. For CM choke selection, I have read many app notes which say CM choke is last stage option if emission tests cause an issue although to keep a place holder and select component, I need following information:
Current rating: I can probably use Icc_dom and Icc_rec to cover current rating of the choke,
Inductance: Now to select a value which have minimum insertion loss for CM signals in specified range, that i got but not getting how to select the inductance value.
Regards,
Sunney