


Part Number: TCAN1057A-Q1
Hello ...
We used TCAN1057ADDFEQ1 for our system design...
and you find the attached of the Sch...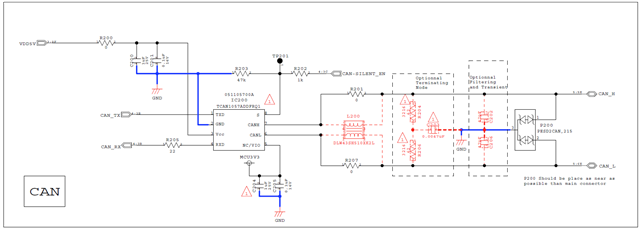
we measured the system initial of the CAN waveform...(system initial means system power ON)
and you can see the waveform as attached picture...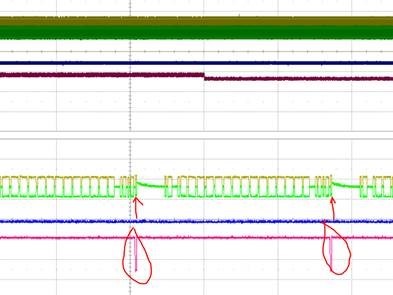
yellow : CAN+
green :CAN-
Blue: system power supply
Red:TX_CAN
you can see that CAN+/CAN- has some "overshoot" likes some offset? when TX_CAN have send data...(red mark and red arrow mark)
We checked many times, the same as CAN+/CAN- suddenly drift up (How to say in English, sorry... likes up and then down) then recover to normal when TX_CAN send data every time...
and then the customer asked me why has this phenomenon...
★measure setup : when the system is not powered on, the CAN analyzer is used to send CAN messages with a cycle of 100ms.
the system and CAN analyzer have 120ohm resistor(because the system has no mounted as a red dotted lines in circuit)
so could you please explain it why in detail?
Thanks
B,R
hejun

