Part Number: TCAN4550
Dear Team,
We are using TCAN4550 module in i.MX8M Mini processor-based hardware with modified tcan4x5x driver of kernel 5.4.70. We have set below configurations,
SPI frequency: 18MHz
Crystal clock frequency: 40MHz
Bit rate to transfer CAN data: 500kbps
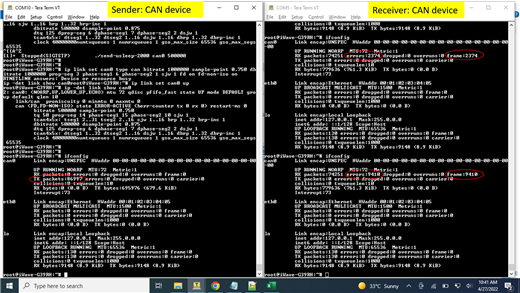
Currently we are able to receive 150 Frames per second at 500 Kbps using a simulator. Beyond 160 frames per second, we notice the candump application hangs. Frame has 8 bytes of data and payload together has 16 bytes frame.
We need to test our hardware for receiving 1500 data frames per second from CAN Simulator. CAN Simulator sends 1500 data frames per second. How can I increase the reception of CAN data frames?
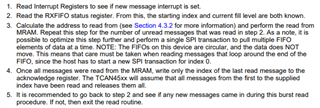
Do I need to increase the RX FIFO 0 and RX FIFO 1 values in mram configuration in dts file?.
Current tcan4x5x configuration in dts file is shown below.
&ecspi3 {
fsl,spi-num-chipselects = <1>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_ecspi3>;
cs-gpios = <&gpio5 25 GPIO_ACTIVE_LOW>;
status = "okay";
tcan4x5x1: tcan4x5x@0 {
compatible = "ti,tcan4x5x";
reg = <0>;
pinctrl-names = "default";
#address-cells = <1>;
#size-cells = <1>;
interrupt-parent = <&gpio1>;
interrupts = <15 IRQ_TYPE_LEVEL_LOW>;
spi-max-frequency = <18000000>;
bosch,mram-cfg = <0x0 3 2 32 10 1 32 7>;
clocks = <&hclk>, <&cclk>;
clock-names = "hclk", "cclk";
data-ready-gpios = <&gpio1 15 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio3 20 GPIO_ACTIVE_HIGH>;
status = "okay";
};
};
Best Regards,
Aysha T