Part Number: TCAN1044A-Q1
Hi,
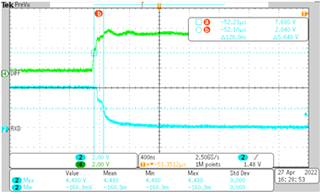
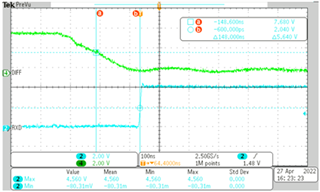
During bench testing (@25C), it was observed that the for 250kbps baud rate, the rise time and fall time of CANH & CANL are followings:
CANH: rise =51.6ns , fall = 124ns
CANL rise = 100ns and fall 49.6 ns
Vdiff rise = 62ns and fall 314 ns
In the datasheet, these values are mentioned for the condition (STB = 0V or Short to ground) RL = 60ohm, CL = 100pF)

Please let me know what should be the rise/fall time fall time values for normal operation in order to have pass fail criteria.
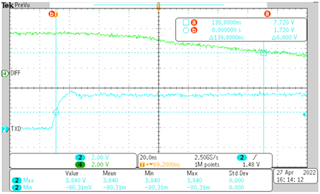
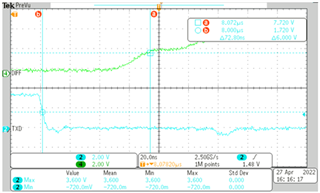
Test set up details:
Used PCAN tool in laptop for communication. wire length (~1.5m)
Probes: Used differential probe or spring probe.
Please let me know if you have any question.
Thanks,
Sunney