Part Number: TCAN1044-Q1
Other Parts Discussed in Thread: TCAN1044V
Hi Experts
When we use TCAN1044 in our project, we bump into some questions.
Here shows the schematic as follows:
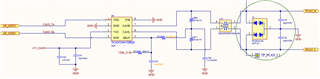
And the clock frequency is 40MHz, the data bit rate is 5Mbit/s.
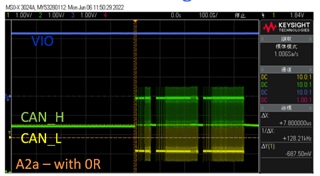
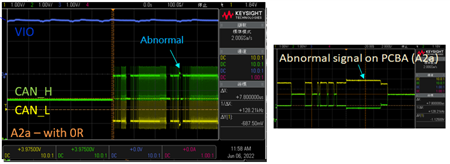
In our application, the module connects with PCAN and receives a lot of error frame.
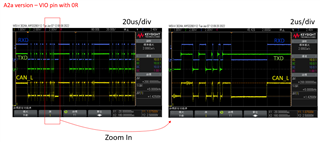
If we replace R73 from 0 ohm to 10k ohm at VIO pin, we will not detect another error frame. Why?
Do you have any idea about this phenomenon?
Thanks.
Jasper