Other Parts Discussed in Thread: ALP
Hi,
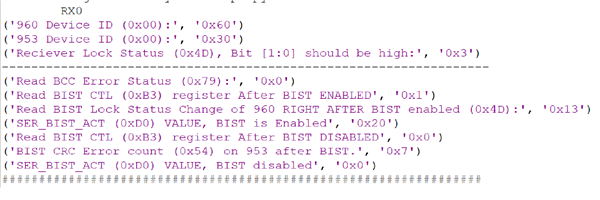
Our system has two ub960s, each with four ub953s connected to it. Each ub953 is connected to a camera. The whole system works fine, and we are able to stream images from the cameras. I'm attempting to write a program to evaluate the link quality between the ub960s and ub953s by using the BIST functionality. However, when I set the BIST Control Register (0xB3) on a ub960 to 0x1 none of the attached ub953s enter BIST mode. This is confirmed by checking the SER_BIST_ACT bit in the PORT_DEBUG Register (0xD0) for each RX port on the ub960. I also check the REMOTE_PAR_CAP1 Register (0x35) on the ub953 and BIST_EN bit is 0. Is there any reason the ub953 wouldn't enter BIST mode after enabling it on the ub960? Also, since register 0xB3 is not RX port specific, will it enable BIST on all connected ub953s? Thanks