Part Number: DP83826E
Hi,
We are having link loss issues on an ethercat system, and are having a really hard time figuring out what is going on. We have been trying to figure this out for over 2 weeks of troubleshooting.
We have been integrating an ethercat motor controller family for 5+ years from a well known motor control manufacturer. We have designed countless carrier boards with the same ethercat magnetics circuit that have been proven to work reliably in many designs. This manufacturer eventually had to change their ethercat PHY chip due to chip shortage. They migrated from the KZS8081 to the DP83826E. We recently have discovered that installing any of the newer motor controller modules using the new PHY (DP83826E) into our newest carrier boards result in non-functional ethercat, due to periodic link loss. Installing the older motor controller modules (KSZ8081) into the same carrier boards result in functional, reliable ethercat.
We have no access to the phy itself since it is buried in the motor control module sandwhich, and we have no access to the motor control manufacturer's schematics or firmware. I figured out which PHY's they were using by cutting open two motor controllers from older and newer serial number groups. The manufacturer has not responded to any of our technical inquiries so far on this issue, and we have 50+ of these drives purchased already, and very few drives left with the old PHY. We are in great need to resolve this link loss issue.
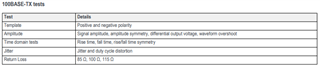
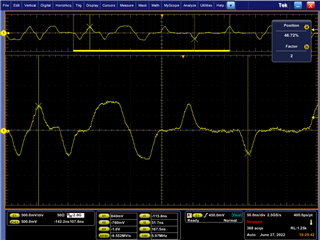
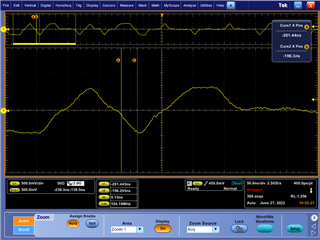
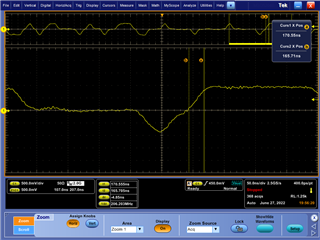
We have scoped the ethercat signal integrity using a 2GHz Tek 5024 oscilloscpe with 3.5GHz differential probes, and feel the signal integrity looks good even on the boards with the DP83826E. The best I can see is that the MLT train from the MDI pins will just cut out. I don't know what is causing the link loss.
Can you list potential problems that would cause link loss in relation to the DP83826E itself? Could this be related to the type of magnetics we are using? Would logging the ethercat frames on profishark (includes crc error frames) show us why a link would drop? How can I packet sniff and decode the encoded MLT pulses coming out of the MDI port on the phy directly to identify why the link is dropping? Are there any tools I available I can use to do this? If there is a way to decode it, I can identify if the link losses are happening randomly, or if they are happening as a result of a particular repeating communication incident. Discovering the reason for the link loss is the key behind understanding and fixing our problem.
Any help that can be provided would be of enormous help for us.
Thanks,
Kevin Wood