Other Parts Discussed in Thread: DP83826EVM, TMS320F28388D, C2000WARE, TMDSCNCD28388D, TMDSHSECDOCK, DP83826E, MSP430F5529
Hello all,
We are using DP83826 to works with F28388D. I guess just like many customer here, because DP83822 is so unavailable. However, the experience of the DP83826 so far is so so strange.
The DP83826 works when configured to 10M (disable auto-Negotiation, and set to 10M). However 100Mhz never works, no matter how we change the configurations, and we never get a RX_D[x] on oscilloscope.
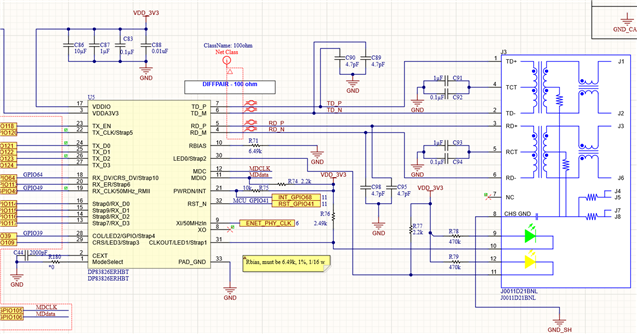
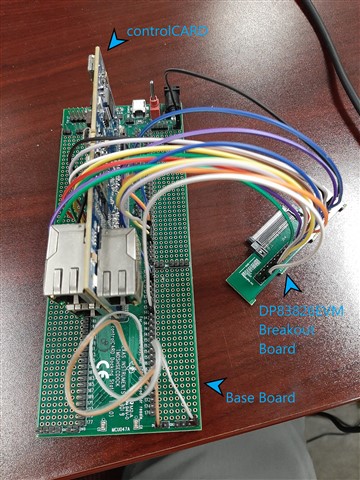
The schematic and hardware straps of hardware is as showing schematic.
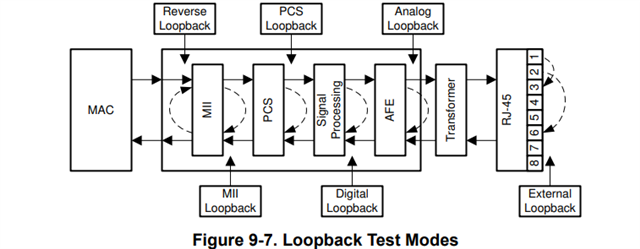
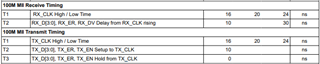
During the external loopback test with 100M, RX_Dx never get any signal (10M set works normal) and RX_ER just acts as RX_DV.
Only when we do MII feedback in 100M mode, we can get RX_Dx signal (on oscilloscope), and received packages are correct by CCS debugger. However, PCA and digital feedback can not get any RX packages, even did not get a error RX packages from view of CCS debugger.
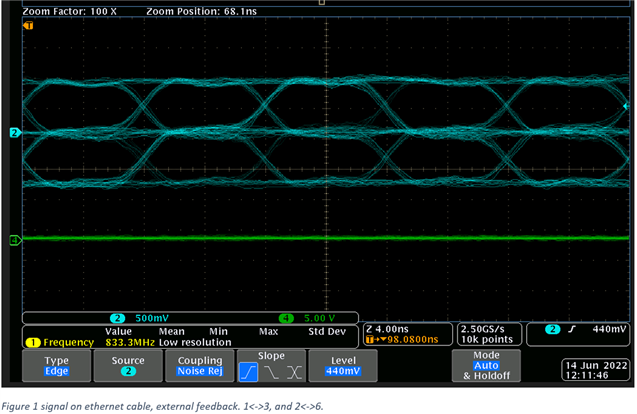
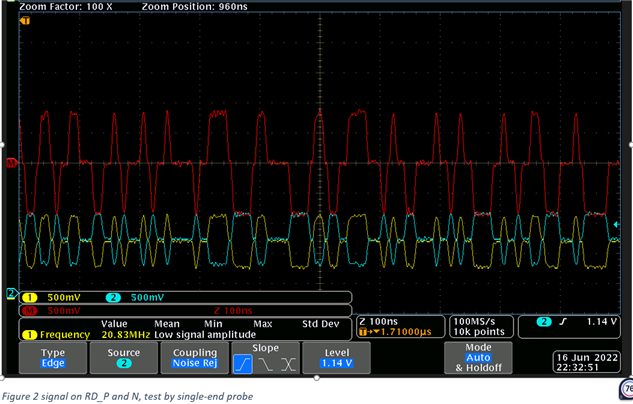
We checked clock, 25M to XI perfectly. The 100M signal (eye pattern) from the RJ45 is also attached. Looks should work. The signal on RD_P and RD_N is also attached. Please help to double check. I think the signals are good enough to get a 100M signal.
I tried a lot register setup I could figure out in CCS, but all failed.
Any suggestions? Is there any hardware/registers configure I should try to check 100M receiving? Or are there any CCS codes I could try?
Any suggestion will be appreciated. Thanks you all in advance.