


Part Number: TCAN1044AV-Q1
Hello Concern,
We are using the TCAN1044AVDRQ1 in one our product. We are testing fault condition for CAN bus Communication.
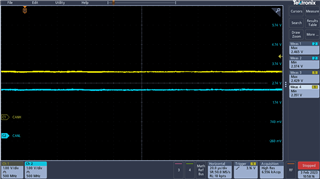
When We Shorted CANH - CANL bus line, CAN Communication halted- CAN bus goes off ( Which is Intended) - Both Line Voltage during Fault Condition is ~2.5V.
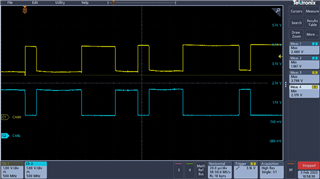
But When Fault Removed - CAN Bus Communication is not Recovered. CAN Bus get Freeze and Required the Hard power Reset.
Is this CAN Fault Condition (CANH Shorted to CANL) supported by TCAN1044 device or not?
As Other Fault condition working as expected --> Auto CAN recovery is there.
CANH Shorted to GND and VBAT
CANL shorted to GND and VBAT.
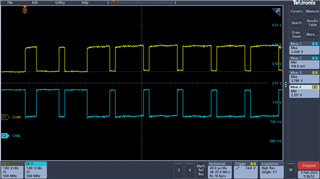
Issue - Scenario - CAN H Shorted to CAN L: -
Normal operation CAN H Shorted to CAN L- fault Condition After Fault Condition Removed
~ Shubham

