Part Number: TCAN1057AV-Q1
Other Parts Discussed in Thread: ESD2CAN24
Hello team,
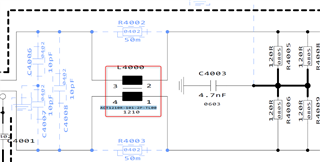
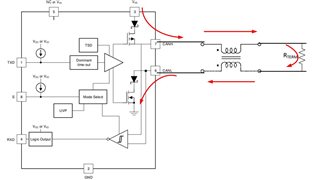
I am planning to use Common mode choke for the CAN TCAN1057AV signal and it was suggested by one the teammate to use 100uH choke.
Please can you explain how to select the value of the Common mode choke and why it is 100uH in most of the design. It will helpfull if you could provide the Answer as early as possible
Thank you