Part Number: THVD1429
Hello everyone,
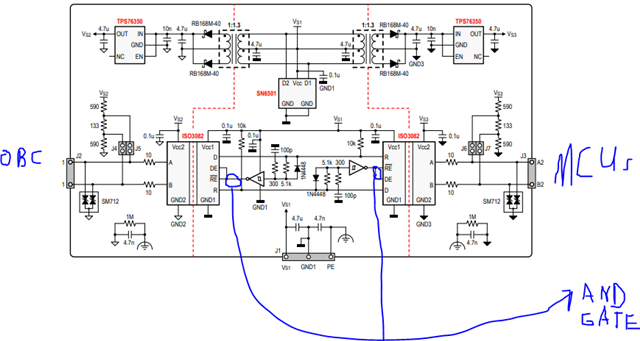
I have a situation like this: there is a subsystem (around one PCB board, which utilises two MSP430 microcontroller). Subsystem communicates with satellite bus thorugh RS485 bus. Inside the subsystem, these two MCUs are both connected to the same bus, so in default operational mode, they exchange infomations between each other using this bus, but in random moment, there could be received a command from OBC (so satellite platform), which has higher priority.
Connection like is because, if failure mode occurs, and one of the microcontrollers failed, OBC can access directly the second one.
the question is, how I can:
a) avoid collision between standard two MCU communication and OBC high priority message,
b) avoid crating a spam on the bus, on the line to the OBC - I want to hide internal communication,
Half-duplex transceivers are used.
So far, I found that I can avoid a) with messages priority and verifying if the bus is in idle before eachj transmission, but what about b)? I see some potential in using RS485 repeater - I can turn off the driver in specific situation, but is this really reliable solution?
I will be glad for any suggestions, maybe solution is really easy but I don't realise this yet.
Btw. Using CAN in this case is not yet an option (compability).
Have a great day!