Other Parts Discussed in Thread: THVD1451
Hello, we have to connect an RS422 device (a sensor) to an RS485 system (data logger).
The connection works in one direction (receive data from the sensor) but not bi-directional, we have tried to connect the RS422 wires in parallel but it does not work.
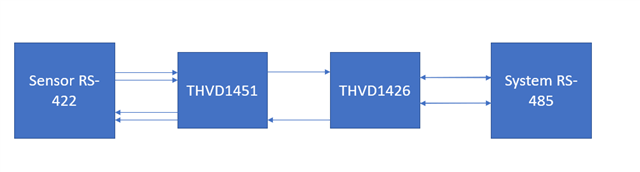
So we would like to create a small interface board between RS485 (2 wires) to RS422 (4 wires).
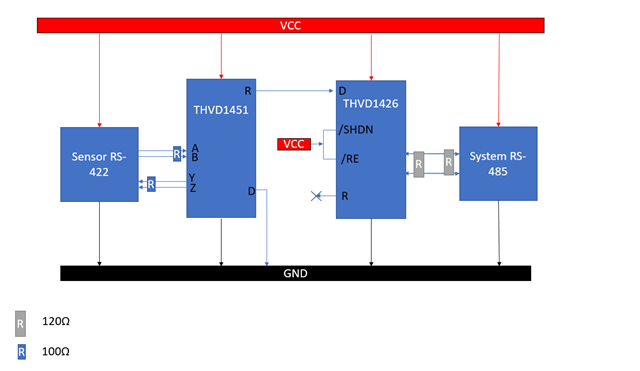
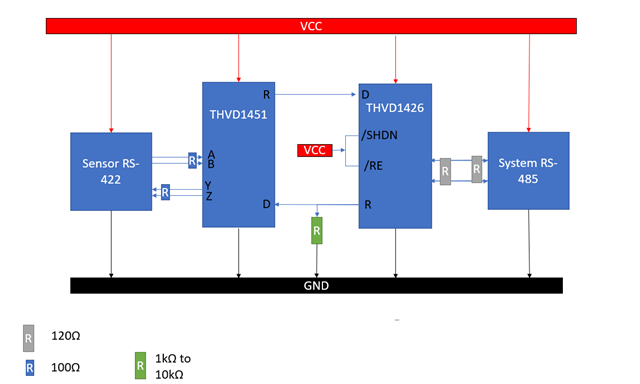
The solution that we consider would be with a device with auto direction control like THVD1426 (on the RS485 side) connected back to back with a full duplex device like THVD1451 (on the RS422 side).
Another option would be to use two other THVD1426 on the RS422 side.
Is this solution OK ?
Thank you,
Mihai