Part Number: TCAN4550-Q1
Other Parts Discussed in Thread: TCAN4550, TCAN4550EVM
I am using the TCAN4550-Q1 with the Adafruit Feather ESP32-S2 TFT to control the chip. I have successfully been able to read registers over SPI, as well as write to them using the ESP32.
I'm now trying to communicate over CAN, and I'm having trouble getting this to work. I'm quite new to this so its very possible that I've made a trivial error in my setup. I have been referring to the data sheet as well as the TCAN45xx Software User's Guide.
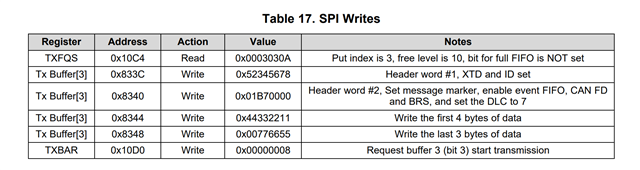
So far, I have configured the CAN timing and MRAM, and read back the TXFQS register to get the put index. I then wrote to the put index, but when reading register 0x1050, the flag for a FIFO message stays as zero.
Here is the code that I am using thus far: