Dear TI expert,
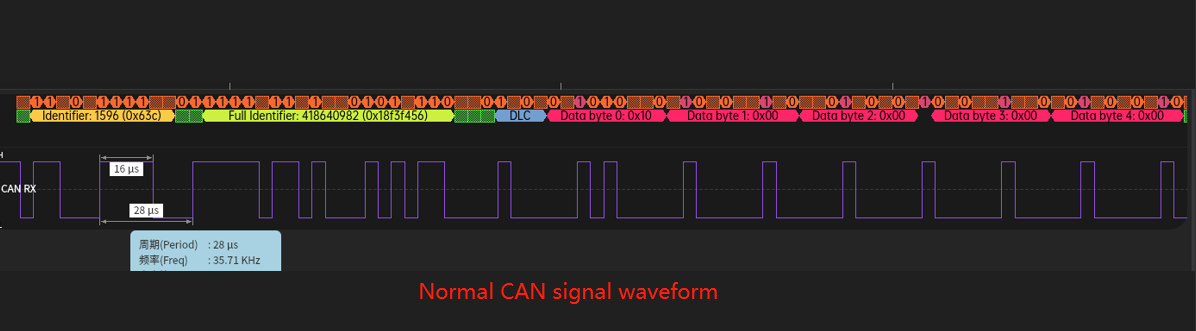
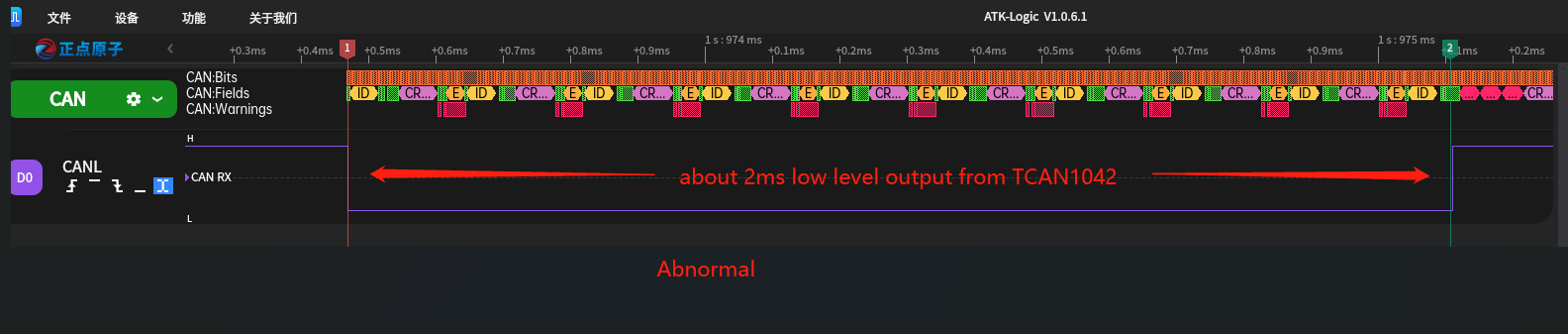
Our product uses TCAN1042-Q1 as the CAN transceiver, we found a problem during the test, after the 1042 is awakened, it will continue to output a low level of 2ms, which causes the receiver device to continue to report errors, we try to replace the same type of CAN transceiver from other manufacturers, there is no such problem, what is the cause of this problem? And how can this be solved? Many thanks!