


Part Number: TDP1204
Other Parts Discussed in Thread: TMDS1204
Linear Mode:
In linear mode the data received from the GPU’s transmitter is the data that will be sent out of the TX end of the redriver. This means that the GPU’s voltage swing, pre-emphasis/ de-emphasis, and slew rate will be seen the output of the redriver.
If implementing a redriver in linear mode, the most important constraint is the linearity region of the redriver. The linearity region determines the voltage swing that the RX of the redriver can handle without any performance issues. The linearity region is determined by the -1dB compression point. This point is determined when an increase to Vin results in a non-linear increase in Vout, meaning that the output voltage swing is oversaturating. The -1dB compression point can change depending on the RX equalization of the redriver. It’s a good practice to tune the RX equalization and the linear region for each implementation of a linear redriver
Here is a sample linearity curve, and its equalization settings for the TDP1204/ TMDS1204
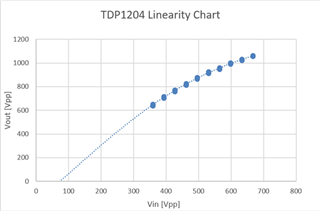
Figure 1: Linearity region for TDP1204/ TMDS1204
[note: the compression region is determined by the RX equalization and is not always at this point]

Figure 2: Redriver register settings
The -1dB compression point is at ~666 mVpp. This means that any voltage swing greater than this will result in signal compression and degradation. Tuning the EQ and Vin voltage swing is key when using a redriver in the linear mode. The coupling of Vin and Vout allows for easy link training, and this linear mode redrivers are best suited for sink applications.
Limited Mode:
In limited mode the data received from the GPU is decoupled from the output data of the redriver. The voltage swing, pre-emphasis or de-emphasis, and slew rate are determined by the settings of the redriver. This means that the redriver can change the pre-emphasis, de-emphasis , and voltage swing depending on the application. The generation of output signals casues the limited mode of the redriver to have higher power consumption than that of the linear redriver. However, there is no linear region in which the redriver needs to operate in. The decoupling of the input and output makes it very difficult to link train. This is why limited redrivers are recommended for source applications.
Summary:
|
Linear Mode |
Limited Mode |
|
Pros - Lower power - Link training transparency - Good for sink application |
Pros - Configurable output settings - Linear region does not affect performance - Good for source application
|
|
Cons - Can only operate in linear region
|
Cons - Higher power consumption - Input and output are decoupled, so not possible to link train
|
