Other Parts Discussed in Thread: TCAN1043
Hi,TI partner:
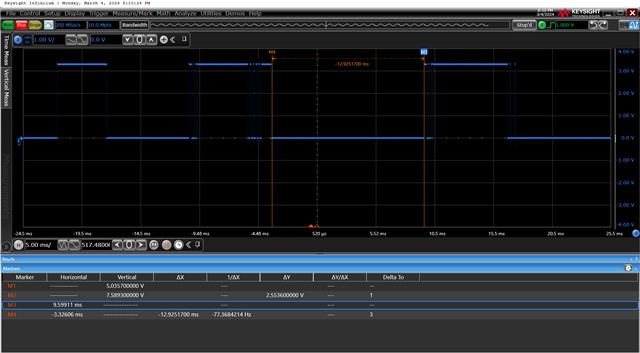
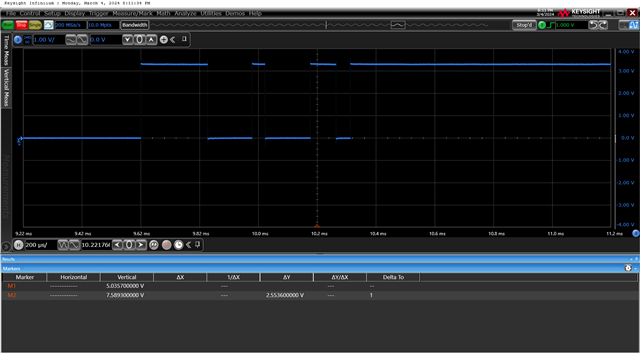
When I short the CANH(pin13) to 12V or GND, the nFAULT(pin8) is Low.But when I short the CANH(pin13) to VCC(pin3) ,the nFAULT(pin8) presents periodic changes, you can see the two pictures for details. What's the reason?