A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
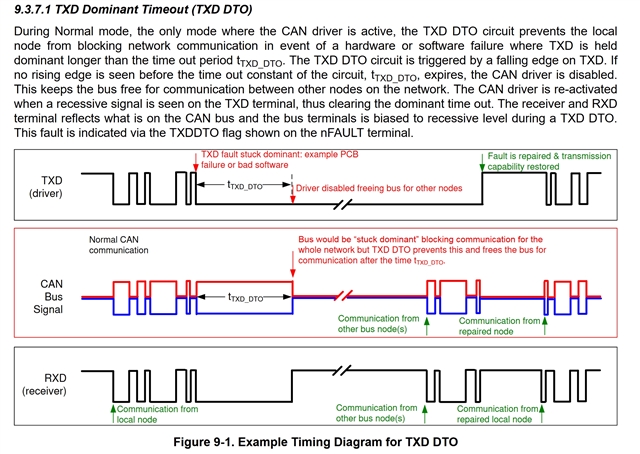
There is no CAN node that would want to do this. This is explained in the note following the figure:
The CAN protocol allows a maximum of eleven successive dominant bits (on TXD) for the worst case, where five successive dominant bits are followed immediately by an error frame.
Clemens is correct. The purpose of the dominant time out is to make sure there are no errors on your bus. If you are running at a rate above 9.2 kbps then if all of a sudden your bus is held dominant indefinitely the other CAN transceivers can no longer communicate on the bus. This could lead to some catastrophic safety problems in a vehicle or other systems. That is why dominant time out exists in the case that a device stops working at least the other CAN transceivers can continue to communicate.