


Part Number: TCAN1044AV-Q1
Tool/software:
Hi, we are using TCAN1044AVDRBRQ1 for our can communication.
MCU: Imxrt1170
Speed:10kbps
Module clock: 24Mhz
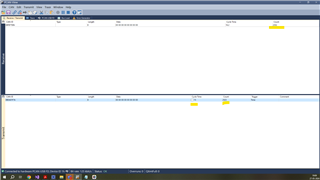
To verify the transmission speed of Classical can i did loop back from PCAN viewer to MCU and vice versa.
Working condition
The loop back is working fine, when i keep each frame delay with minimum of 30-40ms its working fine.
Failure condition
when i reduce delay to less than 30ms seconds, frames are missing, please look in to the shared images of peak can viewer.
So what is the minimum delay required between consecutive frames?
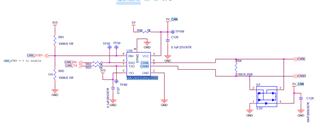

Please verify our schematic once? and how can i overcome this problem?
how can i test individually can transceiver?
Regards,
Sandeep C
