Tool/software:
Hi,
I am building a UAV Flight Controller based loosely on the Pixhawk Open Standards but I have some queries regarding a change in ethernet PHY and how to setup the transformer/Magnetics properly. I currently have success talking to certain ethernet devices, but some refuse to talk/get an ip.
The Standard I am following can be found here: https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-010%20Pixhawk%20Autopilot%20Bus%20Standard.pdf With the example Ethernet PHY on page 18 but also here:
In my application I am using an STM32H743 connected over RMII to a different PHY, the DP83825IRMQR (Rather than the examples DP83848T). It mostly follows the example in the open standard for the magnetics.
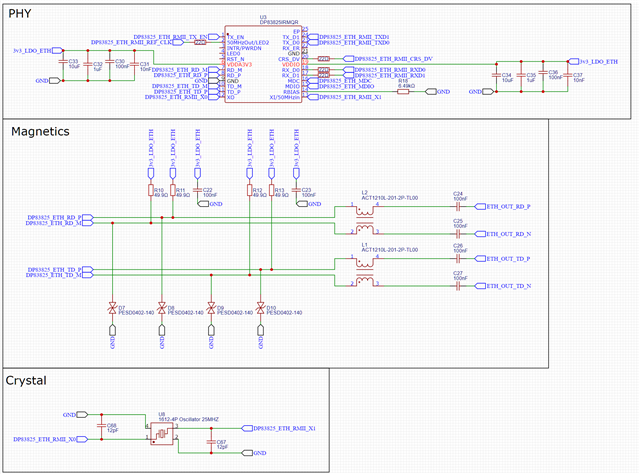
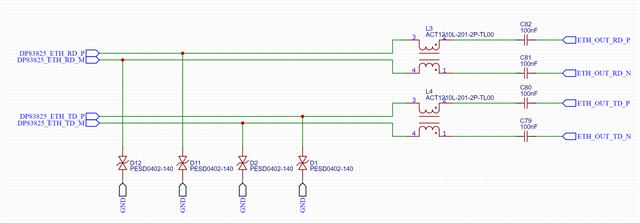
My question is about magnetics/transformers. It looks like the open standard is using a transformer-less design, which I copied but I am having some connectivity issues with some devices.
1) Should I be using a transformer-less design with the DP83825? I am trying to keep component size/count to an absolute minimum.
2) I am using discrete transformers for the CMC, what should I do about center taps that would otherwise be there?
3) I have noticed that the devices it doesn't work with do not have their centre taps connected to anything either, could this be a cause?