Part Number: TCAN4550
Tool/software:
Hi team,
Customer is using TCAN4550 EVM connect into their system, they are debugging. Get following question for
1. Send: According to a demo found online, when calling TCAN4x5x_MCAN_WriteTXBuffer and TCAN4x5x_MCAN_TransmitBufferContents to send data, it is found that the function is only called once, but tcan4550 keeps sending. At this time, the above function is called again to modify the sending content, but it is found that it does not take effect, and the message of the first call is still sent.
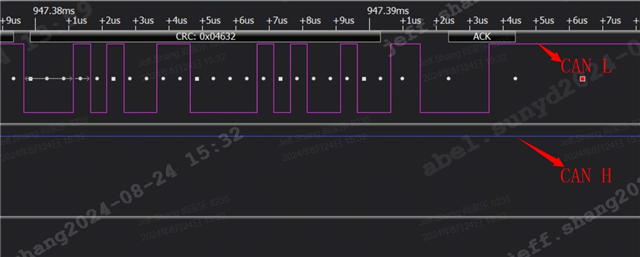
2. Receiving: Using canoe to send a can message to TCAN, there is no ACK response. Is the tcan4550 configuration wrong?
Could you help share comments for the above 2 questions?
Customer on the CC list.
Thanks and Best Regards,
Will