


Part Number: TCAN1043-Q1
Tool/software:
Hello team,
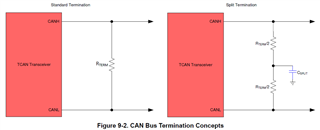
1. The CAN datasheet recommended using a 120Ω resistor for the terminal node, but in real case, non-terminal nodes may use R1=R2=1.3KΩ as the terminal resistor.
a) What is the benefit based on "R1=R2=1.3kΩ's use case" Under what circumstances would choose this?
b) Is this design related to the length of the ECU CAN branch?
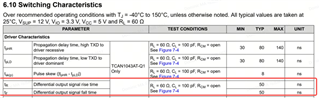
2. For a CANFD controller with 80% sampling points in a 2M data, in a real vehicle test environment, the falling edge time will exceed the 50ns which os over datasheet typical. If we want to ensure that the Daminant and Recessive are read correctly, what is the maximum limit for the falling edge time?
Lanxi
