Part Number: DS90UB960-Q1
Tool/software:
Good afternoon,
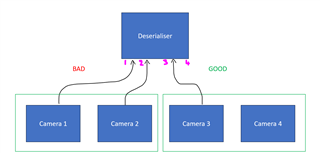
We've looking for some assistance with video "tearing" when using the DS90UB960WRTDT-Q1 deserialiser paired with a DS90UB953TRHBR-Q1 serialiser, which in turn is connected to a 2MP 1080p image sensor operating at 60fps. Our problem seems to occur when we have 2 x DS90UB953TRHBR-Q1 serialiser devices connected to a single port pair (IE, Camera port 0 & 1, Camera port 2 & 3). The problem does not occur if we have multiple cameras across multiple port pairs (IE, Camera port 0 & 3, Camera port 1 & 4).
We have performed countless MAP analyses on the deserialiser with the serialiser connected to all four camera ports and all provide MAP results far exceeding the minimum requirements shown in SNLU24.
We're a bit confused as to what is happening when this "tearing" situation occurs. We believe it may be something to do with the output stream from the deserialisers MIPI CSI-2 ports. For context:
1. Our deserialiser is set to CSI-2 synchronous operation with virtual channels enabled.
2. REFCLK is 25MHz.
3. Maximum data rate per image sensor (per channel) = Horizontal x Vertical x Bits per pixel x Frame Rate x Overhead = 1920 x 1080 x 10 x 60 x 7.5% = 1.338Gbps which is significantly lower than the 160 x REFCLK = 4Gbps forward channel rate mentioned in the datasheet.
4. CSI-2 transmitter frequency has been set to 800Mbps per data lane with continuous CSI-2 clock operation.
5. Best-effort round robin CSI-2 forwarding has been enabled on CSI-2 ports 0 & 1. RX ports 0 & 1 are forwarded to CSI-2 port 0 and RX ports 2 & 3 are forwarded to CSI-2 port 1.
Taking our calculations from above, when two cameras are on a single port pair, we should have 1.338Gbps x 2 = 2.668Gbps across four CSI-2 data lanes. 2.668Gbps / 8 = 334MBps is therefore sent across these four CSI-2 data lanes, which is CSI-0 (port 0) in the datasheet.
To work out the maximum bandwidth of CSI-0 (port-0), we can work out equation (2) on page 45 of the datasheet:
- Hactive = 1080 pixels
- Nsensor = 2
- Ncsi_lanes = 4
- Nbits/pxl = 10 bits
- fcsi = 800MHz
- tcsi = 0.93us
This gives us an a maximum bandwidth of 2.51Gbps / 8 = 314MBps.
Could you please confirm whether the above is true? If our calculations are correct, does this mean we're over the maximum CSI-2 transmitter bandwidth of the deserialiser and to resolve this issue, we should increase the CSI-2 Tx data rate?
Any assistance you can provide would be greatly appreciated. If you would like me to send our schematic, layout, MAP results or I2C configuration, I'd be happy to share so long as we can take this conversation private.
Many thanks for your time.
Connor.