Other Parts Discussed in Thread: TCAN4550
Tool/software:
1. What do i want to do?
I want to configure the Transimission Complete Interrupt to nINT pin, and when data is sent out, I can get the TC Interrupt notification from nINT's IRQ_Handler.
2. What is My Question?
1) I use following code (disable WDT, enable TC & RF0N irq) to initize the tcan4550-q1, and configures IRQ linked to nINT pin
2) Then using SPI to send data out.
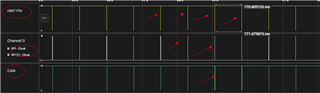
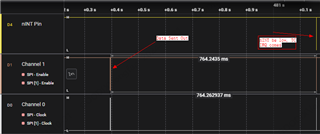
3) When SPI calling is over, it takes about 760ms + for the nINT pin to become low from high (which indicates the Transimmision Complete Interrupt happening)
My Question :
the TC interrupt waits too long to happen after sending data out, it should not be 760ms +, what is the root cause ? please help me to check the configurations. thank you so much ...
following figure shows the big delay
a) following is init code
/********************************************************************
function: board_canfd_ch1_cfg_init
discript:
entrance: none.
return : none
********************************************************************/
void board_tcan4550_cfg(uint8_t baud_nom, uint8_t baud_dat)
{
TCAN4x5x_Device_ClearSPIERR(); // Clear any SPI ERR flags that might be set as a result of our pin mux changing during MCU startup
/* Step one attempt to clear all interrupts */
// TCAN4x5x_Device_Interrupt_Enable dev_ie = {0}; // Initialize to 0 to all bits are set to 0.
// TCAN4x5x_Device_ConfigureInterruptEnable(&dev_ie); // Disable all non-MCAN related interrupts for simplicity
TCAN4x5x_Device_Interrupts dev_ir = {0}; // Setup a new MCAN IR object for easy interrupt checking
TCAN4x5x_Device_ReadInterrupts(&dev_ir); // Request that the struct be updated with current DEVICE (not MCAN) interrupt values
if (dev_ir.PWRON) // If the Power On interrupt flag is set
{
TCAN4x5x_Device_ClearInterrupts(&dev_ir); // Clear it because if it's not cleared within ~4 minutes, it goes to sleep
}
/* Configure the CAN bus speeds */
TCAN4x5x_MCAN_Nominal_Timing_Simple TCANNomTiming = {0};
TCANNomTiming.NominalBitRatePrescaler = baud_list[baud_nom][0];
TCANNomTiming.NominalTqBeforeSamplePoint = baud_list[baud_nom][1];
TCANNomTiming.NominalTqAfterSamplePoint = baud_list[baud_nom][2];
TCAN4x5x_MCAN_Data_Timing_Simple TCANDataTiming = {0};
TCANDataTiming.DataBitRatePrescaler = baud_list[baud_dat][0];
TCANDataTiming.DataTqBeforeSamplePoint = baud_list[baud_dat][1];
TCANDataTiming.DataTqAfterSamplePoint = baud_list[baud_dat][2];
/* Configure the MCAN core settings */
TCAN4x5x_MCAN_CCCR_Config cccrConfig = {0}; // Remember to initialize to 0, or you'll get random garbage!
cccrConfig.FDOE = 1; // CAN FD mode enable
cccrConfig.BRSE = 1; // CAN FD Bit rate switch enable
cccrConfig.DAR = 0; // Disable automatic retransmission
/* Configure the default CAN packet filtering settings */
TCAN4x5x_MCAN_Global_Filter_Configuration gfc = {0};
gfc.RRFE = 1; // Reject remote frames (TCAN4x5x doesn't support this)
gfc.RRFS = 1; // Reject remote frames (TCAN4x5x doesn't support this)
gfc.ANFE = TCAN4x5x_GFC_REJECT; // Default behavior if incoming message doesn't match a filter is to accept into RXFIO0 for extended ID messages (29 bit IDs)
gfc.ANFS = TCAN4x5x_GFC_REJECT; // Default behavior if incoming message doesn't match a filter is to accept into RXFIO0 for standard ID messages (11 bit IDs)
/* ************************************************************************
* In the next configuration block, we will set the MCAN core up to have:
* - 1 SID filter element
* - 1 XID Filter element
* - 5 RX FIFO 0 elements
* - RX FIFO 0 supports data payloads up to 64 bytes
* - RX FIFO 1 and RX Buffer will not have any elements, but we still set their data payload sizes, even though it's not required
* - No TX Event FIFOs
* - 2 Transmit buffers supporting up to 64 bytes of data payload
*/
TCAN4x5x_MRAM_Config MRAMConfiguration = {0};
MRAMConfiguration.SIDNumElements = 8; // Standard ID number of elements, you MUST have a filter written to MRAM for each element defined
MRAMConfiguration.XIDNumElements = 1; // Extended ID number of elements, you MUST have a filter written to MRAM for each element defined
MRAMConfiguration.Rx0NumElements = 5; // RX0 Number of elements
MRAMConfiguration.Rx0ElementSize = MRAM_32_Byte_Data; // RX0 data payload size
MRAMConfiguration.Rx1NumElements = 0; // RX1 number of elements
MRAMConfiguration.Rx1ElementSize = MRAM_32_Byte_Data; // RX1 data payload size
MRAMConfiguration.RxBufNumElements = 0; // RX buffer number of elements
MRAMConfiguration.RxBufElementSize = MRAM_32_Byte_Data; // RX buffer data payload size
MRAMConfiguration.TxEventFIFONumElements = 5; // TX Event FIFO number of elements
MRAMConfiguration.TxBufferNumElements = 5; // TX buffer number of elements
MRAMConfiguration.TxBufferElementSize = MRAM_32_Byte_Data; // TX buffer data payload size
/* Configure the MCAN core with the settings above, the changes in this block are write protected registers, *
* so it makes the most sense to do them all at once, so we only unlock and lock once */
TCAN4x5x_MCAN_EnableProtectedRegisters(); // Start by making protected registers accessible
TCAN4x5x_MCAN_ConfigureCCCRRegister(&cccrConfig); // Enable FD mode and Bit rate switching
TCAN4x5x_MCAN_ConfigureGlobalFilter(&gfc); // Configure the global filter configuration (Default CAN message behavior)
TCAN4x5x_MCAN_ConfigureNominalTiming_Simple(&TCANNomTiming); // Setup nominal/arbitration bit timing
TCAN4x5x_MCAN_ConfigureDataTiming_Simple(&TCANDataTiming); // Setup CAN FD timing
TCAN4x5x_MRAM_Clear(); // Clear all of MRAM (Writes 0's to all of it)
TCAN4x5x_MRAM_Configure(&MRAMConfiguration); // Set up the applicable registers related to MRAM configuration
TCAN4x5x_MCAN_DisableProtectedRegisters(); // Disable protected write and take device out of INIT mode
/* Set the interrupts we want to enable for MCAN */
TCAN4x5x_MCAN_Interrupt_Enable mcan_ie = {0}; // Remember to initialize to 0, or you'll get random garbage!
mcan_ie.RF0NE = 1; // RX FIFO 0 new message interrupt enable
TCAN4x5x_MCAN_ConfigureInterruptEnable(&mcan_ie); // Enable the appropriate registers
/* Setup filters, this filter will mark any message with ID 0x055 as a priority message */
TCAN4x5x_MCAN_SID_Filter SID_ID = {0};
SID_ID.SFT = TCAN4x5x_SID_SFT_RANGE; // SFT: Standard filter type. Configured as a classic filter
SID_ID.SFEC = TCAN4x5x_SID_SFEC_PRIORITYSTORERX0; // Standard filter element configuration, store it in RX fifo 0 as a priority message
SID_ID.SFID1 = 0x00; // SFID1 (Classic mode Filter)
SID_ID.SFID2 = 0x1F; // SFID2 (Classic mode Mask)
TCAN4x5x_MCAN_WriteSIDFilter(0, &SID_ID); // Write to the MRAM
/* Configure the TCAN4550 Non-CAN-related functions */
TCAN4x5x_DEV_CONFIG devConfig = {0}; // Remember to initialize to 0, or you'll get random garbage!
devConfig.SWE_DIS = 0; // Keep Sleep Wake Error Enabled (it's a disable bit, not an enable)
devConfig.DEVICE_RESET = 0; // Not requesting a software reset
devConfig.WD_EN = 0; // Watchdog disabled
devConfig.nWKRQ_CONFIG = 0; // Mirror INH function (default)
devConfig.INH_DIS = 0; // INH enabled (default)
devConfig.GPIO1_GPO_CONFIG = TCAN4x5x_DEV_CONFIG_GPO1_MCAN_INT1; // MCAN nINT 1 (default)
devConfig.FAIL_SAFE_EN = 0; // Failsafe disabled (default)
devConfig.GPIO1_CONFIG = TCAN4x5x_DEV_CONFIG_GPIO1_CONFIG_GPO; // GPIO set as GPO (Default)
devConfig.WD_ACTION = TCAN4x5x_DEV_CONFIG_WDT_ACTION_nINT; // Watchdog set an interrupt (default)
devConfig.WD_BIT_RESET = 0; // Don't reset the watchdog
devConfig.nWKRQ_VOLTAGE = 0; // Set nWKRQ to internal voltage rail (default)
devConfig.GPO2_CONFIG = TCAN4x5x_DEV_CONFIG_GPO2_NO_ACTION; // GPO2 has no behavior (default)
devConfig.CLK_REF = 1; // Input crystal is a 40 MHz crystal (default)
devConfig.WAKE_CONFIG = TCAN4x5x_DEV_CONFIG_WAKE_DISABLED; // Wake pin can be triggered by either edge (default)
TCAN4x5x_Device_Configure(&devConfig); // Configure the device with the above configuration
TCAN4x5x_Device_SetMode(TCAN4x5x_DEVICE_MODE_NORMAL); // Set to normal mode, since configuration is done. This line turns on the transceiver
TCAN4x5x_MCAN_ClearInterruptsAll(); // Resets all MCAN interrupts (does NOT include any SPIERR interrupts)
//TCAN4x5x_Device_ClearSPIERR();
}
// Use this API to init TCAN4550
void board_tcan4550_init(uint8_t baud_nom,uint8_t baud_dat)
{
tcan4550_spi_init(4); // init SPI module
uint16_t ver = TCAN4x5x_Device_ReadDeviceVersion();
uint32_t id0 = TCAN4x5x_Device_ReadDeviceID0();
uint32_t id1 = TCAN4x5x_Device_ReadDeviceID1();
APP_LOG_INFO("CAN ID: 0x%08x.%08x, ver: 0x%04x", id0, id1, ver);
board_tcan4550_cfg(BAUD_1000K, BAUD_4000K);
/* enable all tx buffer interrupt */
AHB_WRITE_32(REG_MCAN_TXBTIE, 0xffffffff);
AHB_WRITE_32(0x800, 0x8004CA0);
/* Enable irq */
AHB_WRITE_32(0x10E0, 0x1);
AHB_WRITE_32(0x1050, 0x0);
AHB_WRITE_32(0x1054, 0x201);
AHB_WRITE_32(0x1058, 0x201);
AHB_WRITE_32(0x105C, 0x201);
AHB_WRITE_32(0x0820, 0xFFFFFFFF);
TCAN4x5x_Device_ClearSPIERR();
}
b) using following code to transmit data out
bool gwcp_spi2can_port_transmit(uint32_t can_id, uint8_t *p_data, uint8_t length)
{
int buf_idx = 0;
int ret = 0;
TCAN4x5x_MCAN_TX_Header header = {0};
header.DLC = len2dlc(length);
header.ID = can_id;
header.XTD = 0;
header.BRS = 1;
header.FDF = 1;
header.RTR = 0;
ret = TCAN4x5x_MCAN_WriteTXBuffer(buf_idx, &header, p_data);
TCAN4x5x_MCAN_TransmitBufferContents(buf_idx);
return true;
}