Part Number: TCAN1048AV-Q1
Tool/software:
Hi expert
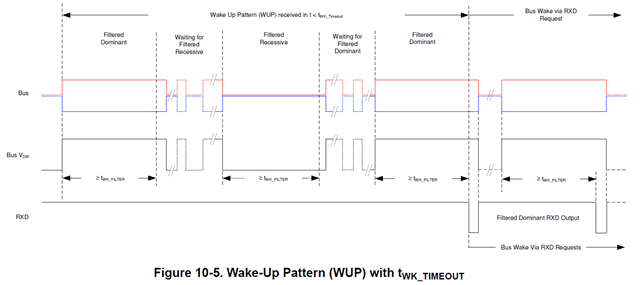
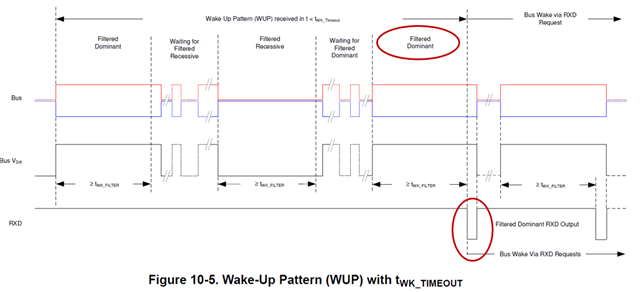
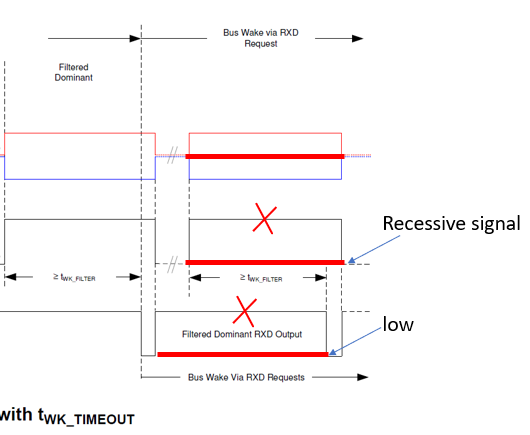
i saw the following picture in our datasheet. RXD is high during "Filtered Dominant RXD Output" in the below picture.
i am thinking if Recessive signal happen in "Bus Wake via RXD Request" whether RXD should be low during "Filtered Dominant RXD Output" ?
thanks