Part Number: TCAN4550-Q1
Other Parts Discussed in Thread: TCAN4550
Tool/software:
Hello!
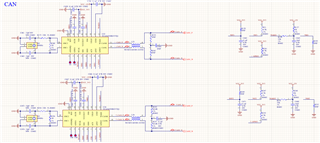
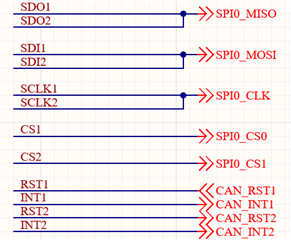
Two TCAN4550-Q1 chips are attached to one SPI on our device, and communication is switched through chip selection. The problems are as follows:
Symptom:
1. When the device is used for 1 to 3 hours, CAN1 fails to send data to the CAN bus at random time, but CAN receive data on the CAN bus normally, and CAN2 sends and receives data normally;
2. When CAN1 cannot send data, the kernel does not report any error, and CAN1 can be used normally after re-initialization;
3. multiple devices appear the same phenomenon;
4.CAN1 and CAN2 are two completely independent CAN buses connected to each other, and are not connected to one CAN bus;
The schematic diagram is as follows: