Part Number: TMDS1204
Tool/software:
I am going to use TMDS1204 for my project, as exactly liner re-driver (not as limited re-driver), and I am not going to use re-driver’s HPD functionality at all, more than I want to have manual control of the re-driver as much as possible. So let me clarify a couple points regarding the HPD feature.
As I understand HPD_IN has two main goals:
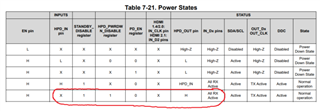
- inform internal logic of re-driver (like HPD_PWRDWN, SIGDET, RX_TERM)
- level-shifter
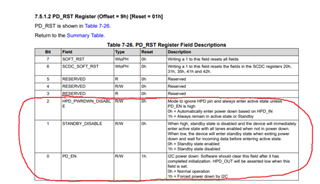
- I would like to control input RX_TERMINATION manually, and as far as I understand I don’t have the capability to overwrite the HPD_IN state. So, I can see only one option for control input termination is using “RX_TERM_DISABLE” 0x08[5] bit and holding HPD_IN pin always HI by HW side. Right?
- I would like to hold the re-driver always active, so I keep “HPD_PWRDWN_DISABLE” 0x01[2] as “1” and HPD_IN pin as HI. So, I should not expect any problems from the relation of power down mode and HPD_IN here. Right?
- Is there any other not obvious relation between HPD_IN and other re-driver’s parts which can be a problem if HPD_IN pin is always HI.