Part Number: TMDS1204
Tool/software:
I am going to use TMDS1204 for my project, as exactly liner re-driver (not as limited re-driver) with as manually control as possible, and only for HI-speed lanes, I am not going to connect DDC, and HPD to the re-driver at all, and have my own circuits for those low-speed signals.
In the datasheet:
7.2.12 Input Signal Detect
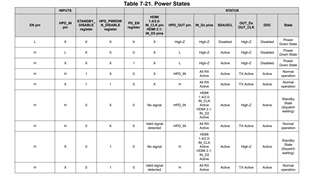
When standby is enabled and swap is disabled, the TMDS1204 waits for a signal on either IN_CLK (if HDMI 1.4 or 2.0) or IN_D2 (if HDMI 2.1). When standby is enabled and swap is enabled, the TMDS1204 looks for a signal on either IN_CLK (if HDMI 2.1) or IN_D2 (if HDMI 1.4 or 2.0). The TMDS1204 is fully functional when a signal is detected. If no signal is detected, then the device reenters standby state waiting for a signal again. In the standby state, all of the TMDS outputs are in high-Z status. In both pin-strap mode and I2C mode, standby is enabled by default. In I2C mode, standby can be disabled by setting the STANDBY_DISABLE register mode.
Is my understanding correct that if I force re-driver's active state this way:
PD_EN = 0,
STANDBY_DISABLE = 1,
HPD_PWRDWN_DISABLE = 1,
HPD_IN pin is always pull-up
then I'll get "TMDS1204 is fully functional" as well, and I should not care about any internal signal detection events. Right?