


Part Number: SN65HVD234
Tool/software:
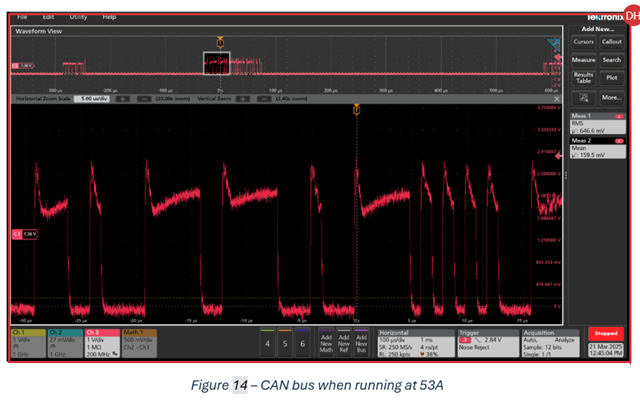

I am using CAN to communicate to motors. When the motor has high current, we see an overshoot in the differential waveform, which is figure 14. Figure 9 is low current in the motor. We don't see the same behavior. Could this cause any issue?