



Part Number: SN65HVD234
Tool/software:
Hi,
I am reading application report "SLLA337", which is related to 3.3V CAN.
Several questions:
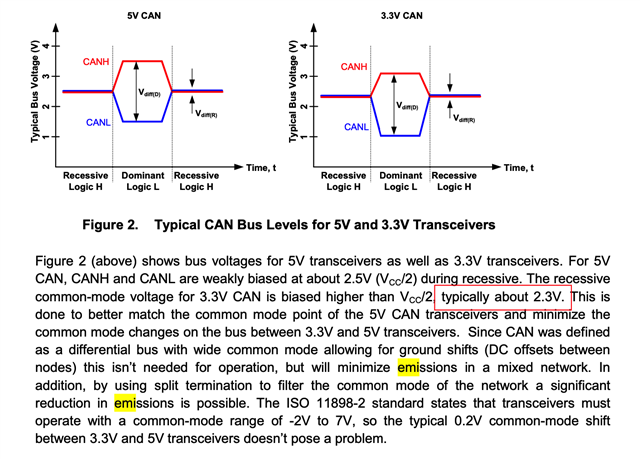
1. To minimize EMC, I need to keep the common mode voltage of CAN bus recessive state same as dominant state, so there is no emission. And it does not matter that this common mode voltage is VDD/2 or VDD/3, as long as it is same for recessive and dominant. Am I correct?
2. For this reason, TI sets 3.3V CAN common mode voltage as 2.3V not 1.65V, in order to match 5V CAN common mode voltage of 2.5V. But why not directly set 2.5V, is because CANH-CANL voltage range?
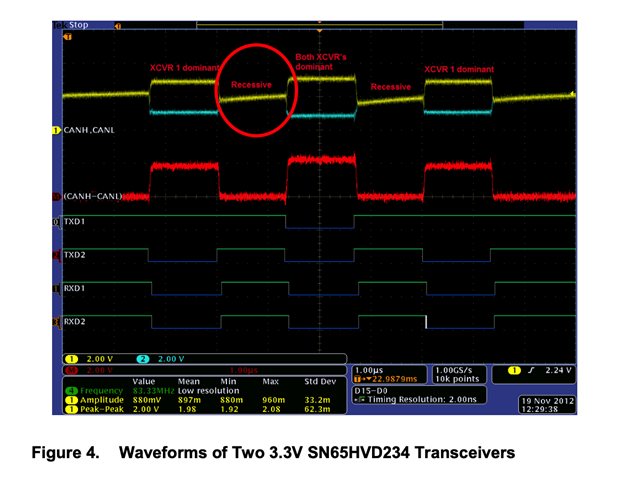
3. For two 3,3V CAN communication, they recessive voltage goes up slowly? Doesn't it cause EMC issue?
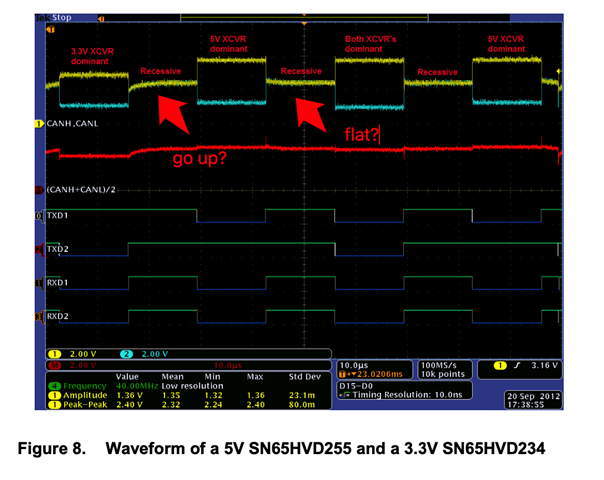
4. When 3.3V CAN talks to 5V CAN, why recessive voltage sometimes goes up, sometimes is flat?
When 3.3V CAN talks to 5V CAN, bus recessive common mode voltage is 2.5V or 2.3V? Or some voltage between 2.5V and 2.3V?
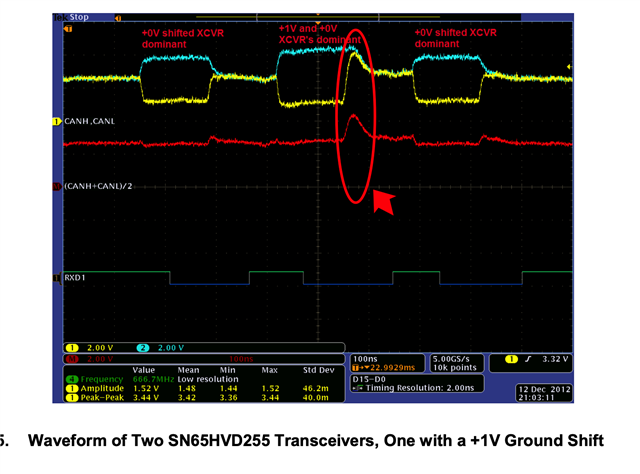
5. Why ground shit causes common mode voltage difference at dominant to recessive? Not during dominant state?
Regards
Nic
