Part Number: TCAN4550-Q1
Other Parts Discussed in Thread: TCAN4550
Tool/software:
Hello team,
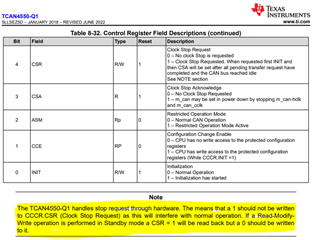
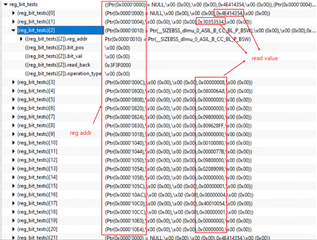
According to the datasheet, when MODE_SEL switch from standby to normal, the CCCR.INT should be written to 0 automatically, but it is found the related register is still 1 in the actual development, so customer want to know is there any other conditions to change the bit?

Thanks!
Regards,
Daniel Wang