Tool/software:
We attempted to measure the internal resistance of the TCAN1044AVDRBRQ1 IC. While we obtained accurate results for CAN High, we encountered issues with CAN Low. The following procedure was used for testing:
Procedure:
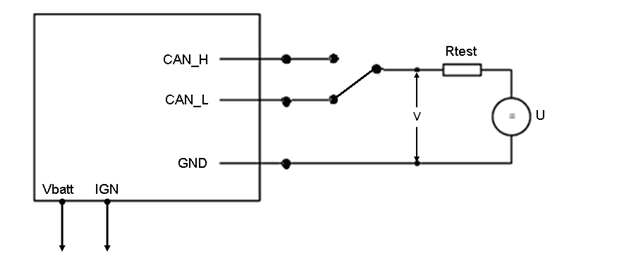
- Measure the precise value of Rtest using an ohmmeter.
- Connect an oscilloscope to observe the voltage ('V') between CAN_H and GND for Rin_CAN_H, and between CAN_L and GND for Rin_CAN_L.
- Power up the ECU at a supply voltage Vbatt of 13.8 V.
- Set U (another power supply) to 5 V.
- Measure 'V' at a recessive level.
- Calculate Rin using the formulas:
- Rin_CAN_L = Rtest * (VCAN_L - V) / (V - U)
- Rin_CAN_H = Rtest * (VCAN_H - V) / (V - U)
VCAN_H and VCAN_L are the output voltages of the CAN_H and CAN_L lines, respectively, during the recessive state when the supply voltage is 13.8 V.
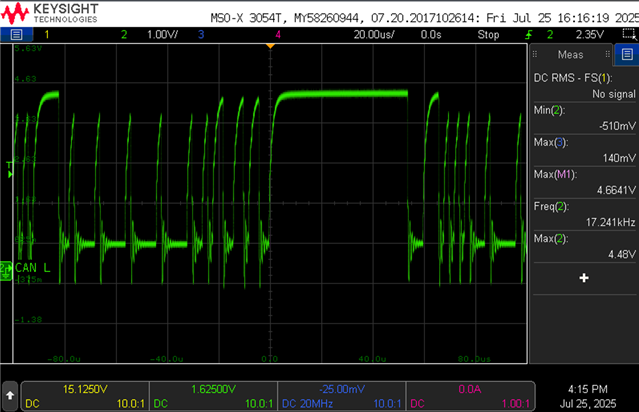
We are observing CAN communication on the line.
Please advise on why this is happening.