Other Parts Discussed in Thread: TSER953, , ALP, USB2ANY
Tool/software:
Hello,
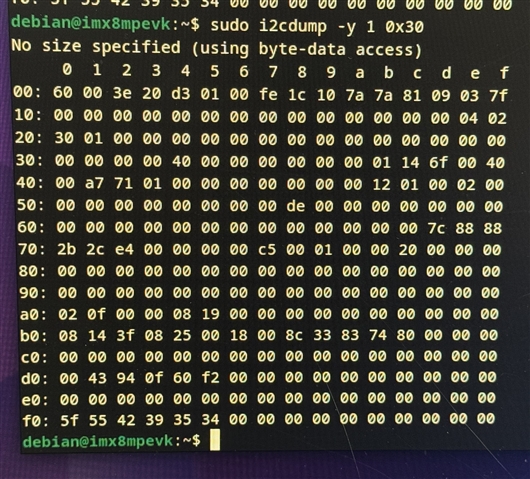
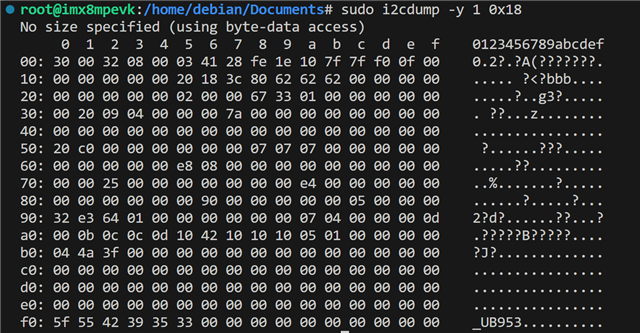
I am working on getting a TDES954/TSER953 combo working for a camera. I can retrieve the camera, TDES, and TSER i2c addresses individually but I cannot get the V3link to output i2c or even output at all, but just want to check verify i2c can get through V3 link. Would it be possible to give a list of registers to change from default to get this working for my application?
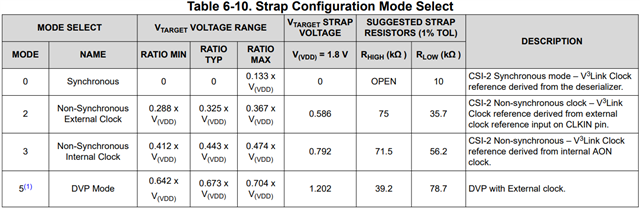
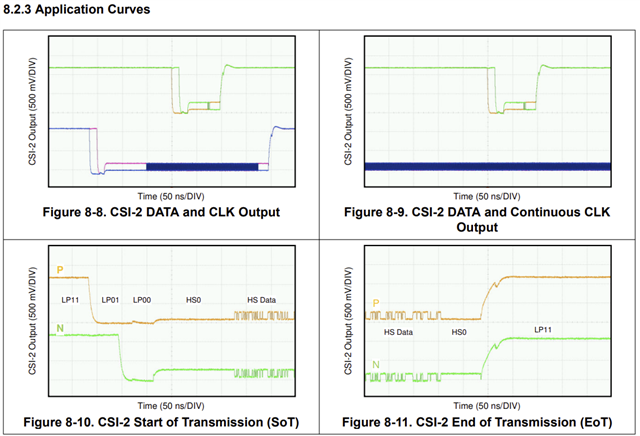
Mode = CSI-2 SYNC
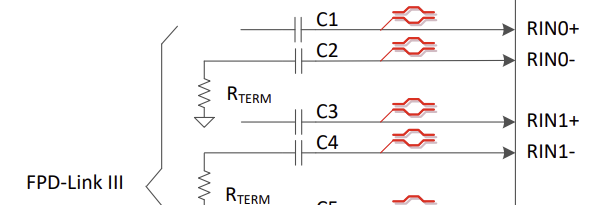
Shielded Twisted Pair