Part Number: TCAN4551-Q1
Tool/software:
Will a short circuit between CAN_H and CAN_L cause this CAN chip to detect a BUSOFF? Currently, we are encountering such an issue:
- When one product using TCAN4551 is mounted on a bus, and CANoe is used to monitor the data reported by the product, after CAN_H and CAN_L are shorted, the product fails to report data and a BUSOFF fault occurs.
- When two products using TCAN4551 are mounted on the same bus, and CANoe is used to monitor the data reported by the products, after CAN_H and CAN_L are shorted, the products will report that a BUSOFF fault has occurred.
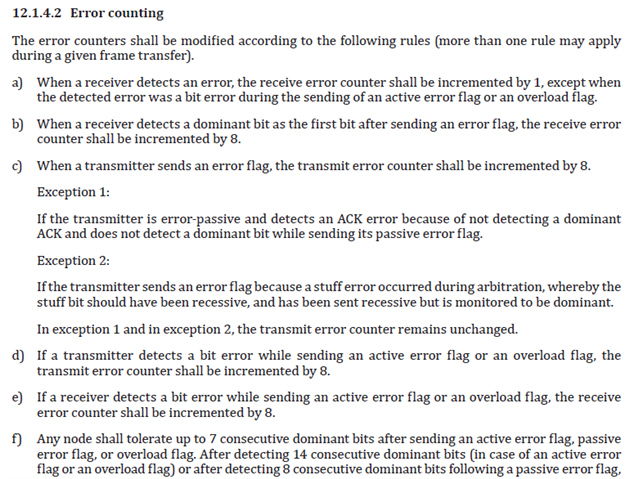
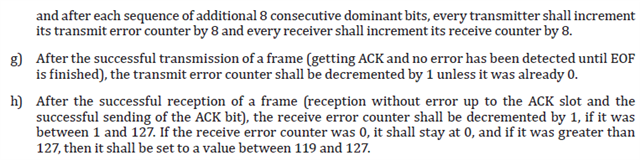
How does this chip determine whether a BUSOFF fault has occurred? Why can’t BUSOFF be detected when there is only one product?