


Part Number: TCAN1146-Q1
Hi Teams,
We have some questions about TCAN1146-Q1 bus fault as following, please help to check, thanks.
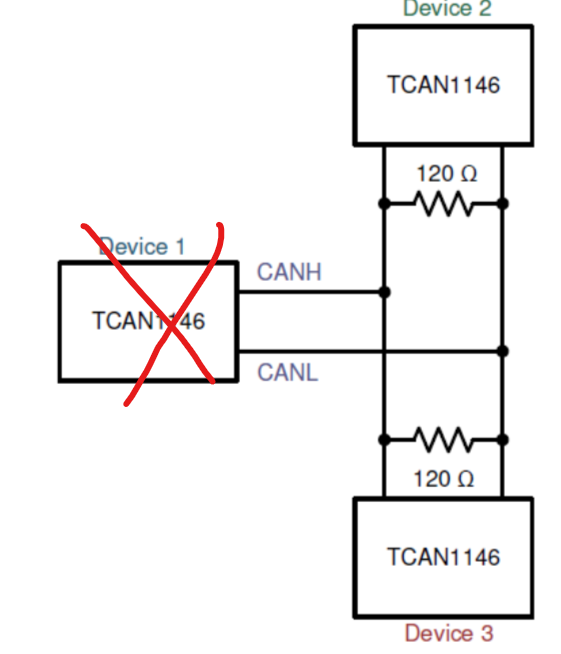
1.In our architecture, as shown in the diagram, but there is no device 1. Can the open bus fault detection in device 2/3 still function?
2. When an open CAN bus fault occurs, is it possible to meet the following recovery time?

3. Will the TCAN1146 force the CAN bus into bus-off state upon a CAN frame error or only bus Fault Interrupt?

