Part Number: SN65HVD1040
Team, we would like to seek your guidance regarding CAN communication signal quality issues observed in our system.
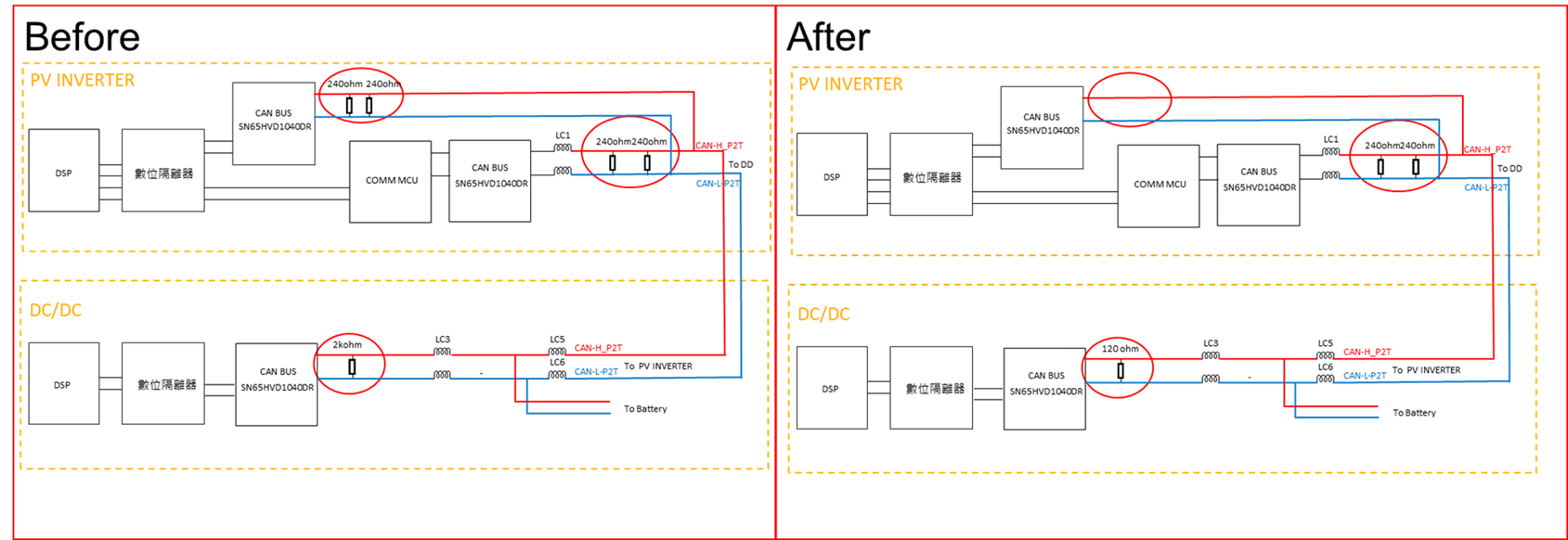
As illustrated in the attached diagram, the “Before” configuration represents the original product design, while the “After” configuration follows the 120Ohm termination scheme recommended in the datasheet.
We have evaluated both termination approaches under the same test conditions. However, in both cases, the CAN signals still exhibit noticeable noise and degraded signal integrity.
From our preliminary analysis, we would like to share several hypotheses and request your feedback:
-
Stub Length Impact
The current topology may introduce relatively long stubs between the transceiver and the main bus, which could lead to signal reflections and ringing. -
Termination Placement
The 120 Ohm termination may not be placed strictly at the physical ends of the bus, potentially causing impedance mismatch along the transmission line. -
Split vs. Standard Termination
We are currently using standard termination. Would TI recommend split termination (e.g., 60 Ohm + 60 Ohm with center tap to GND via capacitor) to improve common-mode noise performance in this application? -
Common-Mode Noise / Ground Potential Difference
Given this is a UPS / power system environment, there may be ground shifts or common-mode disturbances affecting CAN signal quality. -
Common-Mode Choke Usage
Would adding a common-mode choke at the CAN transceiver interface help suppress noise in this scenario? -
Transceiver Drive Strength / Edge Rate
Could the issue be related to transceiver output drive capability or edge rate control, especially under heavier bus loading or longer cable conditions? -
Cable and System-Level Factors
Factors such as cable length, characteristic impedance, node count, and routing topology (daisy-chain vs. star) may also be contributing to the observed behavior.
Given our system architecture, could you please advise on the optimal termination scheme and any additional design recommendations to improve CAN communication robustness?