


Other Parts Discussed in Thread: SN65HVD232, SN65HVD235, CC2520, MSP430F5438A, SN65HVD255
Hello,
I need to implement the functionality of "sending out a single CAN-Message to other nodes" if a boolean state changes on my PCB.
Overall number of nodes at the bus will be 3-4. Bus-Speed is fixed at 100kbps/125kbps .
I am using a MCP2515 Controller with an TI SN65HVD232 3,3V CAN-Transceiver. Later I switched to SN65HVD235 because I needed CAN-H and CAN-L to withstand +/-15V.
Unfortunately I had trouble with both 3V3 Transceivers.

I'm sending out CAN-Messages in an endless loop and watching CAN-H and CAN-L on a scope (no nodes attached to the bus):
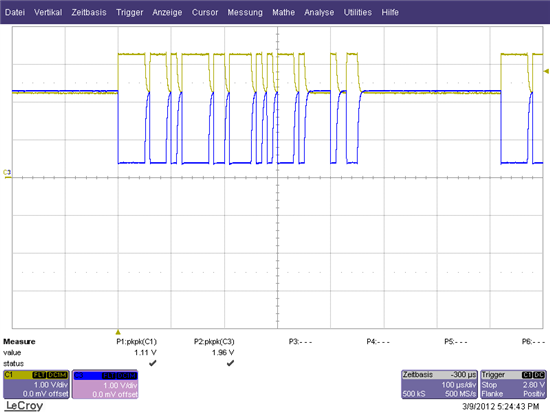
My problem is, that CAN-H / CAN-L seem to be very sensitive and cause the bus to break down (even if nodes are attached).
- While I touch CAN-L the signal is breaking down (and causing the CAN Bus to not work any longer).
- If I add 120R to close the network the signal breaks down too.
- Even adding D8/D9 make the signal break down.
While touching CAN-L:

I don't know what is wrong, but surely something is.
I am new to CAN and dont know where to start searching the problem. The other nodes signals (with 5V Tranceivers) are looking very stable even while touching the signal lines. What am I doing wrong ?

