Other Parts Discussed in Thread: SN65HVD233, ISO1050, SN65HVD256, SN65HVD255
hi,
i need to design application based on 5V MCU that need to intreface with CAN bus.
our customer uses SN65HVD233 to implement the CAN bus.
I need CAN bridge that can tolerate 5V supply and 5V UART connection to the MCU, and ofcuorse can connect to the SN65HVD233.
please reccomend a CAN component to implement.
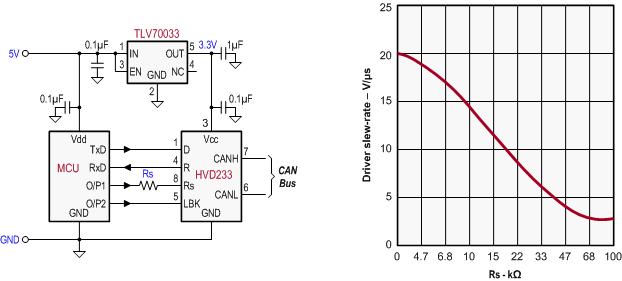
please send me a reference design for the CAN bus component.