Other Parts Discussed in Thread: ISO15
Hi,
I'm looking for communication that can handle a network with ~250kbps for one 10km segment (very large scale network).
In your website, I found the ISO15 Isolated 3.3V, Half Duplex, RS485 Transceiver that combined with Dual isolated half-duplex repeater (figure 5*) (and Design for dual isolated power supplies (figure 6*)), might be suitable for my application.
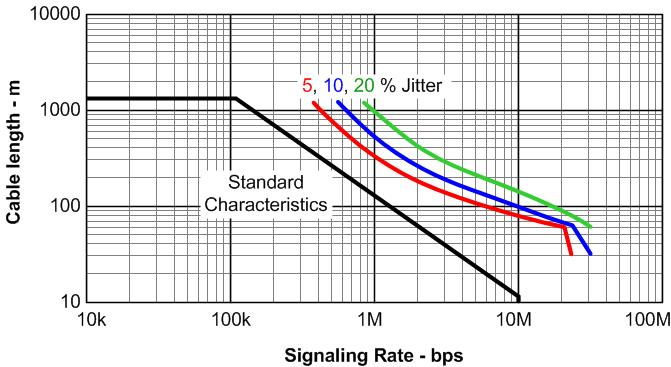
My question is how many repeaters can I connect in serial/ cascade? (The number should be every ~700 meters (somewhere around 14 repeaters for 10km) (Figure 1*)?
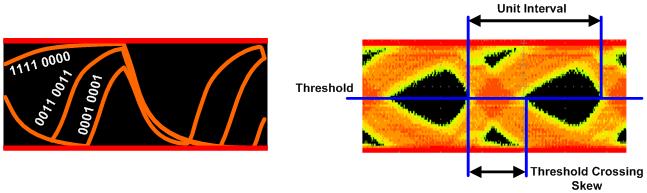
Another question would be about the jitter. Is it correct to assume that if I'm working with 250kbps, I will get 5% jitter (according to Figure 1)? Is using the repeaters in cascade will make it worse? Is it o.k if the system will have 5% jitter for the entire bus?
*"Data-rate independent half-duplex repeater design for RS-485", Applications Engineer (attached herewith)
Thanks a lot,
Idan\
2251.8304.Data-rate independent half-duplex repeater (TI).pdf