A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
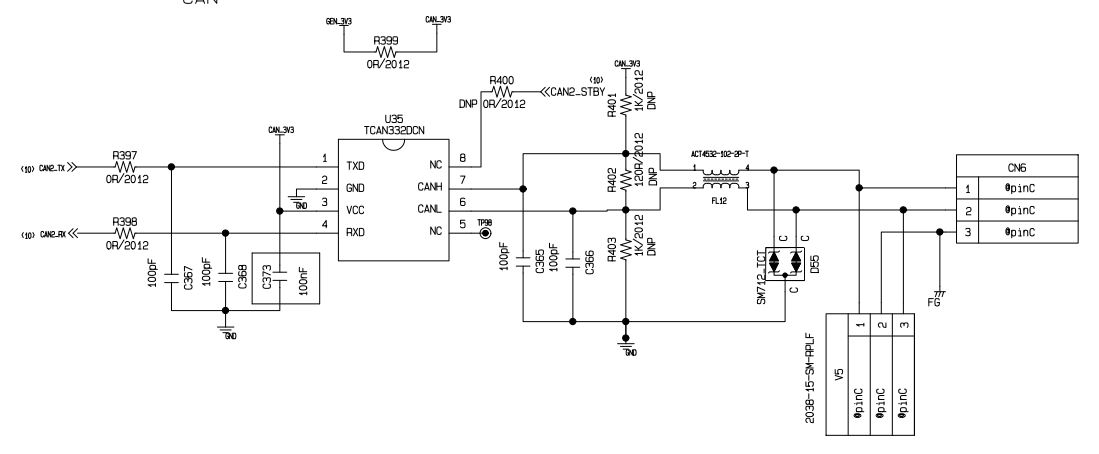
I would move C365 and C366 to the other side of the choke near the SM712. This will help to keep any noise away from the part and away from the choke. I see that R402 is DNP, why is this? Is this for a node that is not at the end of the bus? This is the only case where you would not populate this resistor. If this is at the far end of the bus this would need to be populated for proper termination. Also, what is the purpose of the failsafe biasing circuit on the bus pins? We typically do not see this in CAN applications but I am sure it is not unheard of. Failsafe biasing is something that you see more of in 485.
Yes, I think you need R402. Are you familiar with multipoint communication technologies? In multipoint communication you terminate the far end of the bus to eliminate reflections and leave the intermediate stubs unterminated with short stubs.
Failsafe biasing is the act of pulling one of the differential pairs towards Vcc (R401) and the other half of the differential pair towards ground (R403). This creates a bias point that is somewhere away from zero. The reason I say that we typically see this in RS-485 is because legacy RS-485 transceivers have a +/-50mV differential voltage requirement around 0V and this is a problem in noisy environments that can lead to false transitions by the transceiver. Failsafe biasing pulls the differential point away from 0 to a point like 100mV so that you would have to be >=150mV before a transition could be registered by the transceiver.
We typically do not see this in CAN because of how the technology is implemented. In CAN anything on the bus <=500mV is a recessive and greater >=900mV is dominant bit. SO failsafe biasing is not really needed.
Below is a screen shot from the TCAN332 EVM users guide schematic and I do not see anything implemented on this schematic that was discussed above:
we move C365 and C366 to the other side of the choke near the SM712.
on the other hand, do we need add R11, Jump4, R12 and Jump5 in really application ? i think we don't need to add them.
because we could change R7 and R15 to meet the request. is it right ?